स्टेपर मोटर (Stepper Motor) आधुनिक ऑटोमेशन और पोजिशन कंट्रोल सिस्टम का एक अत्यंत महत्वपूर्ण घटक है। यह एक विशेष प्रकार की ब्रशलेस DC मोटर होती है, जो निरंतर घूमने के बजाय निश्चित कोणीय स्टेप्स (Steps) में रोटेशन करती है। प्रत्येक इनपुट पल्स के साथ इसका शाफ्ट एक निर्धारित कोण पर आगे बढ़ता है, जिससे अत्यधिक सटीक गति और स्थिति नियंत्रण संभव हो पाता है।
रोबोटिक्स, CNC मशीन, 3D प्रिंटर, प्रिंटर-स्कैनर मैकेनिज़्म तथा माइक्रोकंट्रोलर आधारित एम्बेडेड सिस्टम में इसका व्यापक उपयोग किया जाता है। इस लेख में हम स्टेपर मोटर की कार्यप्रणाली, प्रकार, ड्राइवर सर्किट, 8051 के साथ इंटरफेसिंग, सर्वो मोटर से तुलना तथा माइक्रोकंट्रोलर द्वारा ड्राइविंग जैसे सभी महत्वपूर्ण पहलुओं को विस्तार से समझेंगे।
Table of Contents
स्टेपर मोटर क्या है? (What is Stepper Motor)
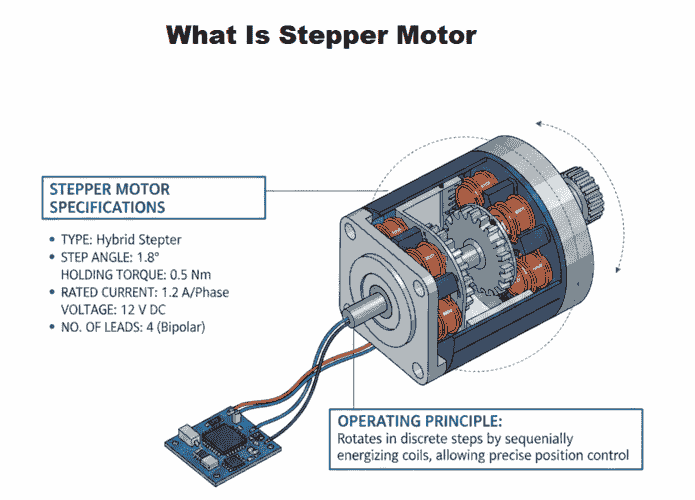
स्टेपर मोटर एक ब्रशलेस और तुल्यकालिक विद्युत मोटर है जो डिजिटल विद्युत पल्स को सटीक, नियंत्रित और चरणबद्ध (Step-by-Step) घूर्णन में परिवर्तित करती है। यह निरंतर नहीं घूमती, बल्कि प्रत्येक इनपुट पल्स पर एक निश्चित कोण (Step Angle) के बराबर घूमती है।
इसका अर्थ है कि यदि मोटर का स्टेप एंगल 1.8° है, तो 200 पल्स देने पर यह 360° का एक पूर्ण चक्र पूरा करेगी। इस प्रकार मोटर की स्थिति (Position), दिशा (Direction) और गति (Speed) को केवल पल्स की संख्या और आवृत्ति (Frequency) नियंत्रित करके सटीक रूप से नियंत्रित किया जा सकता है।
स्टेपर मोटर की प्रमुख विशेषता यह है कि यह बिना फीडबैक सेंसर के भी सटीक कोणीय नियंत्रण प्रदान कर सकती है, क्योंकि हर पल्स एक निश्चित यांत्रिक गति उत्पन्न करता है।
संक्षेप में, स्टेपर मोटर वह विद्युत मोटर है जो डिजिटल संकेतों को पूर्व-निर्धारित, सटीक और नियंत्रित घूर्णन में परिवर्तित करती है, जिससे यह पोज़िशन कंट्रोल आधारित अनुप्रयोगों के लिए अत्यंत उपयुक्त बनती है।
स्टेपर मोटर का डायग्राम (Stepper Motor Diagram)
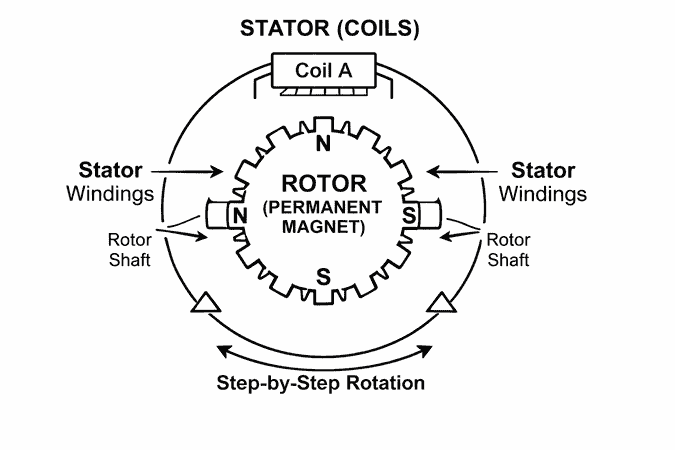
स्टेपर मोटर के डायग्राम में दो मुख्य भाग स्पष्ट दिखाई देते हैं — स्टेटर और रोटर। स्टेटर मोटर का स्थिर भाग होता है, जिसमें कई कॉइल्स (Windings) लगी होती हैं। जब इन कॉइल्स को क्रमबद्ध रूप से विद्युत पल्स दिए जाते हैं, तो वे चुंबकीय क्षेत्र उत्पन्न करती हैं। यह बदलता हुआ चुंबकीय क्षेत्र रोटर की गति को नियंत्रित करता है।
रोटर मोटर का घूमने वाला भाग होता है, जो सामान्यतः स्थायी चुंबक या दाँतेदार लोहे के कोर से बना होता है। जब किसी विशेष कॉइल को सक्रिय किया जाता है, तो रोटर उस चुंबकीय ध्रुव के साथ संरेखित हो जाता है। जैसे ही अगली कॉइल को पल्स दिया जाता है, रोटर एक निश्चित कोण पर आगे बढ़ जाता है।
इस प्रकार, कॉइल्स को क्रम से सक्रिय करने पर रोटर छोटे-छोटे निश्चित चरणों (Steps) में घूमता है। डायग्राम यह दर्शाता है कि स्टेटर की कॉइल्स और बीच में स्थित रोटर की पारस्परिक क्रिया ही स्टेपर मोटर को सटीक, नियंत्रित और चरणबद्ध घूर्णन प्रदान करती है।
और पढ़ें: डीसी सर्वो मोटर परिभाषा, डायग्राम, विशेषताएँ और अनुप्रयोग
स्टेपर मोटर का कार्य सिद्धांत (Working Principle of Stepper Motor)
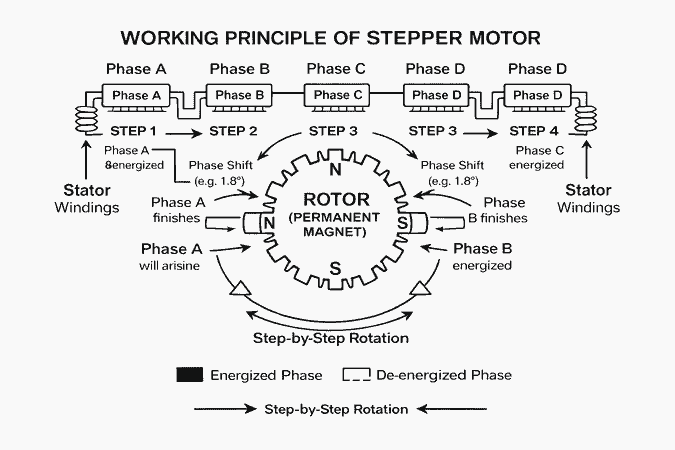
स्टेपर मोटर का कार्य सिद्धांत विद्युतचुंबकत्व (Electromagnetism) और क्रमबद्ध फेज़ उत्तेजना (Sequential Phase Excitation) पर आधारित है। यह मोटर डिजिटल विद्युत पल्स को निश्चित, नियंत्रित और चरणबद्ध घूर्णन में परिवर्तित करती है। प्रत्येक इनपुट पल्स रोटर को एक निर्धारित कोण तक घुमाता है, जिससे सटीक पोज़िशन नियंत्रण संभव होता है।
मोटर की मूल संरचना दो मुख्य भागों से मिलकर बनी होती है—स्टेटर और रोटर। स्टेटर में दांतनुमा संरचना पर कॉइल्स (Windings) लगी होती हैं, जबकि रोटर या तो स्थायी चुंबक का बना होता है या नरम लोहे के परिवर्तनीय रिलक्टेंस कोर का। जब स्टेटर की किसी फेज़ कॉइल में धारा प्रवाहित की जाती है, तो वह एक विद्युतचुंबक बन जाती है और चुंबकीय क्षेत्र उत्पन्न करती है। रोटर उस चुंबकीय क्षेत्र के साथ स्वयं को संरेखित कर लेता है। यही संरेखण एक “स्टेप” कहलाता है।
चरणबद्ध घूर्णन क्रमिक फेज़ स्विचिंग के माध्यम से प्राप्त होता है। उदाहरण के लिए, यदि पहले Phase A को ऊर्जा दी जाए तो रोटर उसकी दिशा में स्थिर हो जाता है। इसके बाद Phase B सक्रिय किया जाता है और Phase A निष्क्रिय होता है, जिससे चुंबकीय क्षेत्र की दिशा बदलती है। रोटर नए ध्रुव के साथ संरेखित होने के लिए एक निश्चित स्टेप एंगल तक घूमता है। यही प्रक्रिया अन्य फेज़ों के साथ क्रमशः दोहराई जाती है, जिससे पूरा 360° घूर्णन अनेक छोटे-छोटे चरणों में पूर्ण होता है। स्टेप एंगल वह निश्चित कोण है जितना रोटर प्रत्येक पल्स पर घूमता है।
उदाहरणतः यदि स्टेप एंगल 1.8° है, तो पूर्ण 360° घूर्णन के लिए 200 पल्स की आवश्यकता होगी। स्टेप एंगल मोटर की संरचना और दांतों की संख्या पर निर्भर करता है, और यही इसकी पोज़िशनिंग सटीकता निर्धारित करता है।
और पढ़ें: AC Servo Motor क्या है?
स्टेपर मोटर का निर्माण (Construction of Stepper Motor)
स्टेपर मोटर का निर्माण पारंपरिक DC मोटर से मिलता-जुलता अवश्य है, किंतु इसकी आंतरिक संरचना विशेष रूप से सटीक स्टेपिंग, उच्च रिज़ॉल्यूशन और नियंत्रित टॉर्क प्राप्त करने के लिए अभिकल्पित (engineered) की जाती है। मोटर का प्रदर्शन—जैसे स्टेप एंगल, गति, टॉर्क और स्मूदनेस—मुख्य रूप से स्टेटर और रोटर की संरचना पर निर्भर करता है।
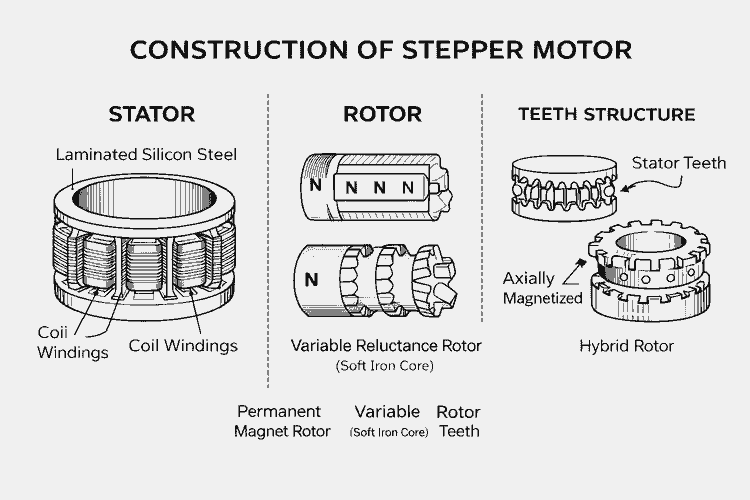
स्टेटर (Stator)
स्टेटर मोटर का स्थिर बाहरी भाग होता है, जो सामान्यतः लैमिनेटेड सिलिकॉन स्टील से निर्मित किया जाता है ताकि एडी करंट हानि कम हो और चुंबकीय दक्षता बढ़े। इसमें अनेक ध्रुव (Poles) होते हैं, जिन पर तांबे की कॉइल वाइंडिंग की जाती है। जब इन वाइंडिंग्स में धारा प्रवाहित होती है, तो वे विद्युतचुंबक की तरह कार्य करती हैं और नियंत्रित चुंबकीय क्षेत्र उत्पन्न करती हैं। फेज़ों की संख्या—जैसे 2-फेज, 3-फेज या 5-फेज—मोटर की स्मूदनेस, रिज़ॉल्यूशन और नियंत्रण की गुणवत्ता को प्रभावित करती है। व्यावहारिक अनुप्रयोगों में दो-फेज स्टेपर मोटर सबसे अधिक प्रचलित हैं।
रोटर (Rotor)
रोटर स्टेपर मोटर का घूर्णनशील भाग है, जो स्टेटर के केंद्र में स्थित होता है और चुंबकीय क्षेत्र के प्रभाव से चरणबद्ध रूप से घूमता है। इसकी संरचना मोटर के टॉर्क, गति, रिज़ॉल्यूशन और समग्र प्रदर्शन को सीधे प्रभावित करती है। संरचना के आधार पर रोटर के तीन प्रमुख प्रकार होते हैं।
- स्थायी चुंबक रोटर (Permanent Magnet Rotor): इस प्रकार का रोटर स्थायी चुंबक से बना होता है। यह अपेक्षाकृत अच्छा टॉर्क और डिटेंट टॉर्क प्रदान करता है, जिससे बिना ऊर्जा के भी हल्की होल्डिंग क्षमता बनी रहती है। इसकी संरचना सरल होती है, लेकिन गति और स्टेप रिज़ॉल्यूशन अन्य उन्नत प्रकारों की तुलना में सीमित हो सकता है।
- परिवर्तनीय रिलक्टेंस रोटर (Variable Reluctance Rotor): यह रोटर नरम लोहे के कोर से निर्मित होता है और इसमें स्थायी चुंबक नहीं होता। यह चुंबकीय रिलक्टेंस के सिद्धांत पर कार्य करता है। इसकी विशेषता उच्च गति और बेहतर रिज़ॉल्यूशन प्राप्त करने की क्षमता है, परंतु इसका टॉर्क अपेक्षाकृत कम होता है और डिटेंट टॉर्क लगभग नहीं के बराबर होता है।
- हाइब्रिड रोटर (Hybrid Rotor): यह स्थायी चुंबक और परिवर्तनीय रिलक्टेंस दोनों का संयोजन होता है। इसमें अक्षीय चुंबकन (Axial Magnetization) और दाँतेदार संरचना का उपयोग किया जाता है, जिससे उच्च रिज़ॉल्यूशन (जैसे 0.9° स्टेप एंगल), बेहतर टॉर्क और उत्कृष्ट पोज़िशनिंग सटीकता प्राप्त होती है। इसकी संरचना जटिल और लागत अधिक होती है।
दाँत संरचना (Teeth Structure)
स्टेपर मोटर की सटीकता का प्रमुख कारण रोटर और स्टेटर पर बनी महीन दाँतेदार संरचना है। ये दाँत चुंबकीय फ्लक्स को केंद्रित और नियंत्रित करते हैं। दाँतों की संख्या जितनी अधिक होगी, स्टेप एंगल उतना ही छोटा होगा, जिससे मोटर उच्च रिज़ॉल्यूशन और सूक्ष्म कोणीय नियंत्रण प्रदान कर सकेगी।
शाफ्ट, बियरिंग और हाउसिंग
रोटर शाफ्ट से यांत्रिक रूप से जुड़ा होता है, जो बाहरी लोड तक टॉर्क संप्रेषित करता है। उच्च गुणवत्ता वाली बियरिंग्स शाफ्ट को कम घर्षण के साथ स्मूद घूर्णन में सहायता देती हैं। मोटर की हाउसिंग संपूर्ण असेंबली को यांत्रिक मजबूती, सुरक्षा और संरचनात्मक स्थिरता प्रदान करती है।
और पढ़ें: DC Shunt Motor – परिभाषा, डायग्राम, विशेषताएँ, स्पीड कंट्रोल
स्टेपर मोटर के प्रकार (Types of Stepper Motor)
स्टेपर मोटर मुख्य रूप से संरचना (Construction) और वाइंडिंग कॉन्फ़िगरेशन (Winding Configuration) के आधार पर विभिन्न प्रकार की होती है। सामान्यतः इसे दो प्रमुख तरीकों से वर्गीकृत किया जाता है:
संरचना के आधार पर (Based on Construction)
संरचना के आधार पर मुख्यतः 3 प्रकार की स्टेपर मोटर होती हैं।
1. परमानेंट मैग्नेट स्टेपर मोटर (Permanent Magnet Stepper Motor): इसमें रोटर स्थायी चुंबक का बना होता है। अच्छा टॉर्क प्रदान करती है, लेकिन रिज़ॉल्यूशन अपेक्षाकृत कम होता है। कम गति वाले अनुप्रयोगों में उपयोगी।
2. वेरिएबल रिलक्टेंस स्टेपर मोटर (Variable Reluctance Stepper Motor): रोटर नरम लोहे का बना होता है और इसमें स्थायी चुंबक नहीं होता। उच्च गति और बेहतर रिज़ॉल्यूशन संभव, पर टॉर्क कम होता है।
3. हाइब्रिड स्टेपर मोटर (Hybrid Stepper Motor): यह परमानेंट मैग्नेट और वेरिएबल रिलक्टेंस दोनों का संयोजन है। उच्च रिज़ॉल्यूशन (जैसे 1.8° या 0.9°), बेहतर टॉर्क और उच्च प्रदर्शन प्रदान करती है। अधिकांश औद्योगिक अनुप्रयोगों में यही सबसे अधिक उपयोग की जाती है।
वाइंडिंग कॉन्फ़िगरेशन के आधार पर (Based on Winding Configuration)
वाइंडिंग के आधार पर मुख्यतः 2 प्रकार की होती हैं।
1. यूनिपोलर स्टेपर मोटर (Unipolar Stepper Motor)
यूनिपोलर स्टेपर मोटर में प्रत्येक फेज़ कॉइल के साथ एक केंद्रीय टैप (Center Tap) होता है, जिसके कारण इसकी वाइंडिंग संरचना अन्य प्रकारों से भिन्न होती है। सामान्यतः इसमें चार कॉइल्स होती हैं, और प्रत्येक कॉइल का मध्य बिंदु एक अलग लीड के माध्यम से जुड़ा रहता है। इस संरचना के कारण धारा की दिशा बदलने की आवश्यकता नहीं होती; केवल अलग-अलग आधी वाइंडिंग को सक्रिय करके चुंबकीय ध्रुव बदला जा सकता है।
2. बाइपोलर स्टेपर मोटर (Bipolar Stepper Motor)
बाइपोलर स्टेपर मोटर में प्रत्येक फेज़ के लिए केवल दो लीड होती हैं और इसमें केंद्रीय टैप नहीं होता। इस डिज़ाइन में चुंबकीय क्षेत्र की दिशा बदलने के लिए कॉइल में प्रवाहित धारा की दिशा को उलटना पड़ता है, जिसके लिए एच-ब्रिज (H-Bridge) सर्किट का उपयोग किया जाता है। यद्यपि इसका ड्राइविंग सर्किट यूनिपोलर की तुलना में अधिक जटिल होता है, लेकिन यह अधिक प्रभावी और शक्तिशाली नियंत्रण प्रदान करता है।
और पढ़ें: सीरीज डीसी मोटर की कार्यप्रणाली और अनुप्रयोग
स्टेपर मोटर सर्किट डायग्राम और उसका कार्य
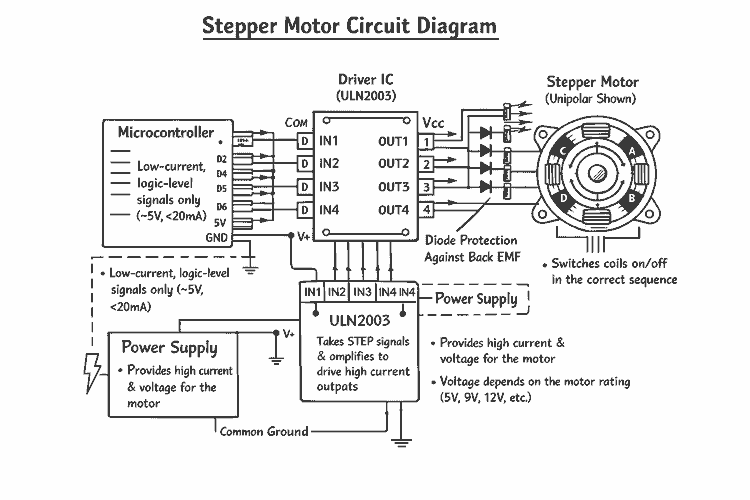
स्टेपर मोटर सर्किट तीन मुख्य भागों से बना होता है—माइक्रोकंट्रोलर, ड्राइवर IC और स्टेपर मोटर। माइक्रोकंट्रोलर केवल लो-करंट लॉजिक सिग्नल देता है, इसलिए वह सीधे मोटर को नहीं चला सकता। मोटर को चलाने के लिए ड्राइवर IC का उपयोग किया जाता है, जो इन सिग्नलों को हाई-करंट आउटपुट में बदलता है।
सर्किट में माइक्रोकंट्रोलर के आउटपुट पिन ड्राइवर IC के इनपुट से जुड़े होते हैं। ड्राइवर के आउटपुट पिन मोटर की कॉइल्स से जुड़े रहते हैं। मोटर को अलग पावर सप्लाई दी जाती है और सभी ग्राउंड पॉइंट कॉमन रखे जाते हैं। ड्राइवर IC बैक EMF से भी सुरक्षा प्रदान करता है।
जब माइक्रोकंट्रोलर क्रमिक सिग्नल भेजता है, तो ड्राइवर IC उसी क्रम में मोटर की कॉइल्स को सक्रिय करता है। इससे रोटर स्टेप-बाय-स्टेप घूमता है। सिग्नल का क्रम बदलने से दिशा बदलती है और स्टेप के बीच का डिले मोटर की गति निर्धारित करता है।
और पढ़ें: ब्रशलेस डी सी मोटर क्या है? उपयोग और महत्व
स्टेपर मोटर ड्राइवर (Stepper Motor Driver)
स्टेपर मोटर को सीधे माइक्रोकंट्रोलर से संचालित नहीं किया जा सकता, क्योंकि मोटर की वाइंडिंग्स को अपेक्षाकृत उच्च करंट और वोल्टेज की आवश्यकता होती है, जबकि माइक्रोकंट्रोलर केवल लॉजिक-लेवल सिग्नल (3.3V या 5V, कुछ मिलीएम्पियर) प्रदान करता है। इस अंतर को पूरा करने के लिए स्टेपर मोटर ड्राइवर का उपयोग किया जाता है, जो कंट्रोल सिग्नल को पावर लेवल में परिवर्तित कर मोटर को सुरक्षित और प्रभावी ढंग से चलाता है।
स्टेपर मोटर ड्राइवर एक पावर-इलेक्ट्रॉनिक्स आधारित इंटरफेस सर्किट होता है। यह माइक्रोकंट्रोलर से आने वाले डिजिटल पल्स को स्वीकार करता है, उन्हें उचित वोल्टेज और करंट स्तर में परिवर्तित करता है, और निर्धारित स्टेप सीक्वेंस के अनुसार स्टेटर कॉइल्स को सक्रिय या निष्क्रिय करता है। इसी प्रक्रिया से मोटर की गति, दिशा और पोज़िशन नियंत्रित होती है। सामान्यतः उपयोग किए जाने वाले ड्राइवर IC में ULN2003, L293D, DRV8825 और A4988 शामिल हैं।
कार्यप्रणाली की दृष्टि से ड्राइवर का मुख्य कार्य कॉइल्स में करंट के प्रवाह और दिशा को नियंत्रित करना है। विशेषकर बाइपोलर मोटर में धारा की दिशा बदलने के लिए एच-ब्रिज संरचना का उपयोग किया जाता है। आधुनिक ड्राइवर स्मूद रोटेशन और नियंत्रित टॉर्क सुनिश्चित करने के लिए उन्नत करंट नियंत्रण तकनीक अपनाते हैं।
इनपुट इंटरफेस के आधार पर ड्राइवर तीन प्रमुख प्रकार के होते हैं। Step/Direction इंटरफेस में एक STEP पिन प्रत्येक पल्स पर मोटर को एक स्टेप आगे बढ़ाता है, जबकि DIR पिन घूर्णन दिशा निर्धारित करता है—यह CNC और 3D प्रिंटर में व्यापक रूप से उपयोग होता है। Phase/Enable इंटरफेस में प्रत्येक फेज के लिए अलग नियंत्रण सिग्नल होता है, जिससे निम्न-स्तरीय नियंत्रण संभव होता है। PWM आधारित इंटरफेस में करंट की मात्रा को पल्स-चौड़ाई मॉड्यूलेशन द्वारा नियंत्रित किया जाता है, जो माइक्रोस्टेपिंग के लिए उपयुक्त है।
ड्राइवरों को वोल्टेज कंट्रोल और करंट कंट्रोल प्रकारों में भी वर्गीकृत किया जाता है। वोल्टेज कंट्रोल ड्राइवर केवल वाइंडिंग पर वोल्टेज नियंत्रित करते हैं, जिससे टॉर्क लोड पर निर्भर हो सकता है। इसके विपरीत, करंट कंट्रोल ड्राइवर सक्रिय कॉइल में प्रवाहित करंट को मॉनिटर और सीमित करते हैं, जिससे स्थिर टॉर्क, बेहतर डायनामिक प्रतिक्रिया और माइक्रोस्टेपिंग संभव होती है। DRV8825 और A4988 जैसे आधुनिक ड्राइवर इसी श्रेणी में आते हैं।
और पढ़ें: स्लिप रिंग इंडक्शन मोटर क्या है?
स्टेपिंग मोड्स और कंट्रोल (Stepper Motor Drive Modes)
स्टेपर मोटर का वास्तविक प्रदर्शन उसके मैकेनिकल निर्माण से अधिक उसके ड्राइविंग तरीके पर निर्भर करता है। ड्राइव मोड यह निर्धारित करता है कि किसी क्षण कितने फेज सक्रिय होंगे, कॉइल्स में करंट का परिमाण और दिशा क्या होगी, तथा परिणामी चुंबकीय वेक्टर किस कोण पर बनेगा। यही कारक टॉर्क, होल्डिंग क्षमता, रिज़ॉल्यूशन, वाइब्रेशन और डायनेमिक रिस्पॉन्स को प्रभावित करते हैं। उचित ड्राइव मोड का चयन अनुप्रयोग की लोड आवश्यकता, सटीकता और लागत के आधार पर किया जाता है।
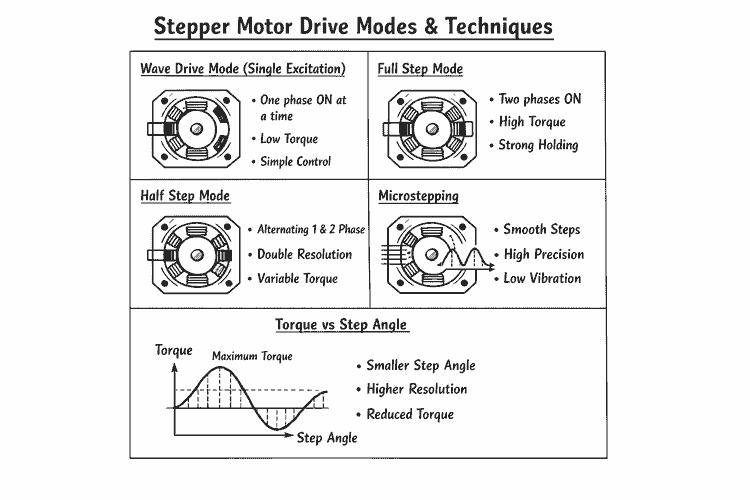
1. वेव ड्राइव मोड (Wave Drive / Single Excitation)
इस मोड में एक समय पर केवल एक फेज सक्रिय होता है, जिससे स्टेटर का चुंबकीय क्षेत्र एक ही कॉइल द्वारा उत्पन्न होता है। कॉइल्स क्रमिक रूप से ON–OFF होती हैं और रोटर क्रमिक स्टेप्स में आगे बढ़ता है। करंट खपत कम रहती है, पावर लॉस कम होता है और सर्किट अपेक्षाकृत सरल रहता है।
हालांकि, केवल एक फेज सक्रिय होने के कारण परिणामी चुंबकीय फ्लक्स कम बनता है, जिससे टॉर्क भी कम प्राप्त होता है। भारी लोड या उच्च त्वरण (acceleration) की स्थिति में स्टेप मिस होने की संभावना बढ़ जाती है। यह मोड कम टॉर्क और उच्च ऊर्जा दक्षता वाले अनुप्रयोगों के लिए उपयुक्त है।
2. फुल-स्टेप ड्राइव (Full Step Mode)
इस मोड में दो फेज एक साथ सक्रिय रहते हैं, जिससे स्टेटर का परिणामी चुंबकीय वेक्टर अधिक शक्तिशाली बनता है। दोनों कॉइल्स के संयुक्त प्रभाव से अधिक फ्लक्स उत्पन्न होता है, जिसके कारण मोटर अधिक रनिंग टॉर्क और बेहतर होल्डिंग टॉर्क प्रदान करती है।
यह मोड स्थिरता और विश्वसनीयता के लिए जाना जाता है तथा मध्यम से भारी लोड वाले अनुप्रयोगों में उपयुक्त है। हालांकि, दो फेज सक्रिय रहने से करंट खपत और ताप उत्पन्न होना वेव मोड की तुलना में अधिक होता है। डायनेमिक परफॉर्मेंस भी बेहतर रहती है क्योंकि रोटर अधिक मजबूती से लॉक होता है।
3. हाफ-स्टेप मोड (Half Step Mode)
हाफ-स्टेप मोड वेव और फुल-स्टेप का संयोजन है। इसमें क्रमशः एक फेज और फिर दो फेज सक्रिय किए जाते हैं। इस क्रम से स्टेप एंगल आधा हो जाता है, जिससे रिज़ॉल्यूशन दोगुना हो जाता है। उदाहरणतः यदि फुल-स्टेप एंगल 1.8° है, तो हाफ-स्टेप में यह लगभग 0.9° हो जाता है।
यह मोड अधिक स्मूद रोटेशन और बेहतर पोजिशनिंग कंट्रोल प्रदान करता है। हालांकि टॉर्क समान नहीं रहता—दो फेज सक्रिय होने पर टॉर्क अधिक तथा एक फेज सक्रिय होने पर कम होता है। इस असमानता को संतुलित करने के लिए कुछ उन्नत ड्राइवर करंट को समायोजित भी करते हैं।
4. माइक्रोस्टेपिंग (Microstepping)
माइक्रोस्टेपिंग सबसे उन्नत ड्राइव तकनीक है, जिसमें प्रत्येक फेज में प्रवाहित करंट को नियंत्रित और क्रमिक रूप से परिवर्तित किया जाता है। सामान्यतः साइन और कोसाइन वेव पैटर्न के अनुसार करंट को नियंत्रित किया जाता है, जिससे परिणामी चुंबकीय वेक्टर छोटे-छोटे कोणों में घूमता है।
इस तकनीक से अत्यंत छोटे स्टेप एंगल (जैसे 1/8, 1/16, 1/32 स्टेप आदि) प्राप्त किए जा सकते हैं। परिणामस्वरूप उच्च पोजिशनिंग सटीकता, कम वाइब्रेशन, कम शोर और बहुत स्मूद रोटेशन मिलता है।
हालांकि, प्रत्येक माइक्रोस्टेप पर उपलब्ध तात्कालिक टॉर्क कम हो सकता है, और इसके लिए जटिल करंट-नियंत्रित ड्राइवर (चॉपर ड्राइव) आवश्यक होते हैं। उच्च सटीकता वाले CNC, 3D प्रिंटर और मेडिकल उपकरणों में यह तकनीक व्यापक रूप से उपयोग की जाती है।
टॉर्क और स्टेप एंगल का संबंध
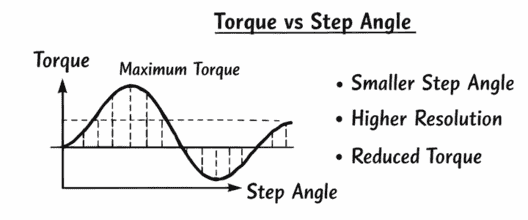
स्टेपर मोटर में उत्पन्न टॉर्क स्टेटर और रोटर के चुंबकीय क्षेत्रों के बीच के कोण के साइन के समानुपाती होता है। अधिकतम टॉर्क तब प्राप्त होता है जब यह कोण लगभग 90° होता है।
जैसे-जैसे स्टेप एंगल छोटा किया जाता है (विशेषकर माइक्रोस्टेपिंग में), प्रत्येक स्टेप पर उपलब्ध टॉर्क घटता है, क्योंकि चुंबकीय क्षेत्र में परिवर्तन सूक्ष्म होता है। इसलिए उच्च रिज़ॉल्यूशन प्राप्त करने के लिए टॉर्क में आंशिक कमी स्वीकार करनी पड़ती है। व्यावहारिक डिजाइन में टॉर्क, स्पीड और रिज़ॉल्यूशन के बीच संतुलन बनाना अत्यंत आवश्यक होता है।
और पढ़ें: सॉफ्ट स्टार्टर (Soft Starter) क्या है?
माइक्रोकंट्रोलर से स्टेपर मोटर इंटरफेस कैसे करें (Stepper Motor Interfacing)
स्टेपर मोटर को माइक्रोकंट्रोलर के साथ इंटरफेस करना लॉजिक कंट्रोल और पावर ड्राइविंग के समन्वय पर आधारित प्रक्रिया है। माइक्रोकंट्रोलर केवल नियंत्रण सिग्नल प्रदान करता है, जबकि मोटर को आवश्यक उच्च करंट और वोल्टेज ड्राइवर IC से प्राप्त होता है। इसी कारण प्रत्यक्ष कनेक्शन संभव नहीं होता।
आवश्यक घटक (Required Components)
इंटरफेसिंग के लिए मुख्य घटक हैं: स्टेपर मोटर (यूनिपोलर या बाइपोलर), माइक्रोकंट्रोलर (8051 / Arduino / PIC), ड्राइवर IC (जैसे ULN2003, L293D) तथा मोटर रेटिंग के अनुसार पावर सप्लाई। माइक्रोकंट्रोलर के I/O पिन सीमित करंट देते हैं, इसलिए ड्राइवर IC लो-करंट सिग्नल को हाई-करंट आउटपुट में परिवर्तित करता है और बैक EMF से सुरक्षा भी प्रदान करता है।
बेसिक कनेक्शन आर्किटेक्चर
इंटरफेसिंग की मूल संरचना इस प्रकार होती है:
Microcontroller → Driver IC → Stepper Motor
माइक्रोकंट्रोलर लॉजिक सिग्नल भेजता है, ड्राइवर IC उन्हें पावर स्तर पर एम्प्लीफाई करता है, और मोटर यांत्रिक आउटपुट प्रदान करती है। माइक्रोकंट्रोलर और ड्राइवर के बीच कॉमन ग्राउंड अनिवार्य है।
8051 माइक्रोकंट्रोलर के साथ इंटरफेस
8051 के पोर्ट पिन (जैसे P1.0–P1.3) को ड्राइवर IC के इनपुट पिन से जोड़ा जाता है। ड्राइवर के आउटपुट पिन मोटर की कॉइल्स से जुड़े होते हैं, जबकि मोटर को अलग पावर सप्लाई दी जाती है।
8051 क्रमिक बाइनरी सीक्वेंस भेजता है, जिसके अनुसार ड्राइवर IC संबंधित कॉइल्स को ON या OFF करता है। सीक्वेंस को दोहराने पर मोटर एक दिशा में घूमती है, और सीक्वेंस उल्टा करने पर दिशा बदल जाती है।
गति नियंत्रण (Speed Control)
स्टेप्स के बीच दिया गया डिले मोटर की गति निर्धारित करता है।
- कम डिले → अधिक गति
- अधिक डिले → कम गति
इस प्रकार सॉफ्टवेयर के माध्यम से स्पीड को नियंत्रित किया जा सकता है।
इंटरफेसिंग में सावधानियाँ
मोटर और माइक्रोकंट्रोलर के वोल्टेज स्तर अलग हो सकते हैं, इसलिए उचित पावर सप्लाई आवश्यक है। कॉमन ग्राउंड रखना अनिवार्य है। बैक EMF सुरक्षा का ध्यान रखना चाहिए (ULN2003 में इनबिल्ट डायोड होते हैं)। सही करंट रेटिंग का ड्राइवर चुनना भी महत्वपूर्ण है।
Arduino और PIC के साथ इंटरफेस
आधुनिक प्रणालियों में Arduino या PIC के साथ इंटरफेसिंग अधिक सरल है। Arduino के डिजिटल पिन सीधे ड्राइवर मॉड्यूल से जोड़े जा सकते हैं। उन्नत अनुप्रयोगों में A4988 या DRV8825 जैसे Step/Direction आधारित ड्राइवर उपयोग किए जाते हैं, जो CNC और 3D प्रिंटर में सामान्य हैं। इन ड्राइवरों में PWM और माइक्रोस्टेपिंग तकनीक के माध्यम से अधिक स्मूद और सटीक घूर्णन प्राप्त किया जाता है।
और पढ़ें: MOSFET क्या होता है?
स्टेपर मोटर vs सर्वो मोटर (Stepper Motor vs Servo Motor)
प्रिसिशन मोशन कंट्रोल सिस्टम्स में स्टेपर और सर्वो मोटर दोनों का महत्वपूर्ण स्थान है। ये दोनों मोटरें पोज़िशनिंग, स्पीड कंट्रोल और टॉर्क मैनेजमेंट जैसे अनुप्रयोगों में उपयोग होती हैं, लेकिन उनकी कंट्रोल आर्किटेक्चर, फीडबैक मैकेनिज़्म और परफॉर्मेंस विशेषताएँ भिन्न होती हैं।
स्टेपर मोटर सामान्यतः ओपन-लूप, पल्स-ड्रिवन सिस्टम पर कार्य करती है, जबकि सर्वो मोटर क्लोज़्ड-लूप फीडबैक सिस्टम के साथ उच्च सटीकता और डायनामिक रिस्पॉन्स प्रदान करती है। नीचे दी गई सारणी में दोनों के बीच तकनीकी तुलना प्रस्तुत है।
| तुलना पैरामीटर | Stepper Motor | Servo Motor |
|---|---|---|
| पोजिशन नियंत्रण | खुला-लूप (Open Loop) | बंद-लूप (Closed Loop) |
| नियंत्रण विधि | पल्स आधारित | फीडबैक सेंसर + कंट्रोल लॉजिक |
| स्पीड रेंज | कम-मध्यम | उच्च |
| टॉर्क विशेषता | स्टार्ट-टॉर्क अच्छा | सामान्यतः अधिक और स्थिर |
| सिस्टम जटिलता | सरल संरचना | अधिक जटिल (ड्राइव + फीडबैक) |
| प्रमुख उपयोग | 3D प्रिंटर, CNC मशीन | रोबोटिक आर्म, UAVs |
स्टेपर मोटर आमतौर पर खुला-लूप और पल्स आधारित नियंत्रण प्रणाली पर कार्य करती है, जबकि सर्वो मोटर में फीडबैक सेंसर और कंट्रोल एल्गोरिद्म के माध्यम से सटीक और नियंत्रित आउटपुट प्राप्त किया जाता है।
स्टेपर मोटर के फायदे और नुकसान (Advantages and Disadvantages of Stepper Motor)
स्टेपर मोटर एक डिजिटल कंट्रोल-ओरिएंटेड मोटर है, जो निश्चित “स्टेप्स” में घूमती है। इसकी आंतरिक संरचना और कार्य सिद्धांत इसे कई अनुप्रयोगों में उपयोगी बनाते हैं। नीचे इसके प्रमुख फायदे और सीमाओं को संक्षेप तथा व्यावहारिक दृष्टिकोण से प्रस्तुत किया गया है।
स्टेपर मोटर के फायदे
- उच्च पोजिशन कंट्रोल – स्टेपर मोटर निश्चित स्टेप एंगल में घूमती है, इसलिए केवल स्टेप्स की गिनती करके मोटर की स्थिति ज्ञात की जा सकती है; अलग पोजिशन सेंसर की आवश्यकता नहीं होती।
- सरल ओपन-लूप ड्राइविंग – सामान्य अनुप्रयोगों में जटिल फीडबैक या ट्यूनिंग की आवश्यकता नहीं होती, जिससे नियंत्रण प्रणाली सरल और कम लागत वाली बनती है।
- कम लागत समाधान – अन्य मोटरों (जैसे सर्वो मोटर) की तुलना में मोटर और कंट्रोल सिस्टम दोनों किफायती होते हैं।
- अच्छा होल्डिंग टॉर्क – स्टैंडस्टिल स्थिति में भी कॉइल एनर्जाइज़ रहने पर मोटर अपनी पोजिशन मजबूती से बनाए रखती है।
- कम गति पर बेहतर टॉर्क – लो-स्पीड ऑपरेशन में यह स्थिर और प्रभावी टॉर्क प्रदान करती है।
- उच्च रेज़ॉल्यूशन (माइक्रोस्टेपिंग के साथ) – माइक्रोस्टेपिंग तकनीक द्वारा अत्यंत सूक्ष्म पोजिशनिंग (बहुत छोटे स्टेप एंगल) प्राप्त की जा सकती है।
- लंबा जीवनकाल – ब्रशलेस संरचना के कारण यांत्रिक घिसाव कम होता है, जिससे मोटर का जीवनकाल बढ़ता है।
स्टेपर मोटर के नुकसान
- हाई स्पीड पर टॉर्क कम – गति बढ़ने पर कॉइल में करंट पूर्ण रूप से विकसित नहीं हो पाता, जिससे टॉर्क घट जाता है।
- स्टेप मिस होने की समस्या – यदि लोड टॉर्क अधिक हो या त्वरण अचानक बढ़े, तो मोटर स्टेप छोड़ सकती है और ओपन-लूप सिस्टम में वास्तविक पोजिशन का पता नहीं चलता।
- फीडबैक न होने पर ओवरशूट संभव – क्लोज्ड-लूप नियंत्रण के अभाव में पोजिशन एरर जमा हो सकता है।
- स्थिर अवस्था में भी उच्च करंट ड्रॉ – मोटर रुकी हुई स्थिति में भी अधिकतम करंट लेती है, जिससे ऊर्जा दक्षता कम और ओवरहीटिंग की संभावना बढ़ती है।
- शोर और वाइब्रेशन – विशेषकर उच्च गति पर मोटर में ध्वनि और रेज़ोनेंस की समस्या उत्पन्न हो सकती है।
- कम पावर घनत्व और टॉर्क-टू-इनर्शिया अनुपात – भारी और उच्च-प्रदर्शन अनुप्रयोगों के लिए यह हमेशा उपयुक्त नहीं होती।
स्टेपर मोटर के उपयोग (Applications of Stepper Motor)
स्टेपर मोटर अपनी सटीक पोजिशनिंग क्षमता, ओपन-लूप कंट्रोल और नियंत्रित गति के कारण आधुनिक ऑटोमेशन और इलेक्ट्रॉनिक प्रणालियों का महत्वपूर्ण हिस्सा बन चुकी है। जहाँ भी किसी वस्तु को निश्चित कोण, निश्चित दूरी या नियंत्रित गति से स्थानांतरित करना होता है, वहाँ स्टेपर मोटर एक विश्वसनीय समाधान प्रदान करती है। नीचे इसके प्रमुख अनुप्रयोगों को व्यवस्थित रूप में समझाया गया है।
- 3D प्रिंटर: 3D प्रिंटर में X, Y और Z अक्ष की सटीक मूवमेंट के लिए स्टेपर मोटर का उपयोग किया जाता है। प्रत्येक स्टेप पर नियंत्रित गति के कारण प्रिंटिंग की परतें (Layers) अत्यधिक सटीक बनती हैं, जिससे उच्च गुणवत्ता की प्रिंटिंग संभव होती है।
- CNC मशीन: CNC (Computer Numerical Control) मशीनों में कटिंग टूल और वर्कपीस की सटीक पोजिशनिंग के लिए स्टेपर मोटर का उपयोग किया जाता है। यह निश्चित स्टेप्स में घूमकर माइक्रो-लेवल पर कंट्रोल प्रदान करती है, जिससे धातु, लकड़ी या प्लास्टिक की सटीक मशीनिंग संभव होती है।
- रोबोटिक्स: रोबोटिक आर्म, जॉइंट कंट्रोल और स्वचालित मूवमेंट सिस्टम में स्टेपर मोटर का व्यापक उपयोग होता है। इसकी नियंत्रित गति और दोहराने योग्य पोजिशनिंग रोबोट को सटीक कार्य करने में सक्षम बनाती है।
- ऑटोमैटिक डोर और कैमरा पैन सिस्टम: ऑटो डोर सिस्टम में दरवाजे को नियंत्रित तरीके से खोलने और बंद करने के लिए स्टेपर मोटर उपयोगी होती है। कैमरा पैन-टिल्ट सिस्टम में यह मोटर सटीक कोण पर कैमरा घुमाने में सहायता करती है, जिससे निगरानी और फोटोग्राफी में बेहतर परिणाम मिलते हैं।
- पोजिशनिंग सिस्टम: इंडस्ट्रियल पोजिशनिंग प्लेटफॉर्म, स्लाइडिंग टेबल और लीनियर एक्ट्यूएटर में स्टेपर मोटर का उपयोग सटीक स्थान निर्धारण (Positioning) के लिए किया जाता है।
- चिकित्सा क्षेत्र (Medical Applications): मेडिकल स्कैनर, सैम्पलिंग मशीन, डिजिटल डेंटल फोटोग्राफी उपकरण, फ्लूइड पंप, रेस्पिरेटर और रक्त विश्लेषण मशीनों में स्टेपर मोटर का उपयोग उच्च सटीकता और नियंत्रित गति के कारण किया जाता है। यहाँ इसकी विश्वसनीयता और नियंत्रित संचालन अत्यंत महत्वपूर्ण होती है।
- उपभोक्ता इलेक्ट्रॉनिक्स: डिजिटल कैमरों में ऑटो-फोकस और ज़ूम कंट्रोल के लिए स्टेपर मोटर का उपयोग किया जाता है। छोटे आकार में सटीक नियंत्रण देने की क्षमता इसे उपभोक्ता इलेक्ट्रॉनिक्स में उपयुक्त बनाती है।
अक्सर पूछे जाने वाले सवाल (FAQ)
1. स्टेपर मोटर काम कर रही है या नहीं, यह कैसे जांचें?
स्टेपर मोटर की कार्यस्थिति जांचने के लिए सबसे पहले मल्टीमीटर से उसकी कॉइल रेज़िस्टेंस मापें और सुनिश्चित करें कि प्रत्येक वाइंडिंग में निरंतरता (continuity) है तथा कोई ओपन या शॉर्ट सर्किट नहीं है; इसके बाद मोटर को उपयुक्त स्टेपर ड्राइवर और निर्धारित वोल्टेज सप्लाई से जोड़कर कंट्रोलर (जैसे माइक्रोकंट्रोलर या पल्स जनरेटर) से पल्स सिग्नल दें और देखें कि शाफ्ट निर्धारित स्टेप्स में घूम रहा है या नहीं; यदि मोटर वाइब्रेट कर रही है पर घूम नहीं रही तो वायरिंग क्रम, ड्राइवर सेटिंग (करंट लिमिट) और पल्स सिग्नल की फ्रीक्वेंसी जांचें; साथ ही हाथ से शाफ्ट घुमाने पर हल्का डिटेंट टॉर्क महसूस होना चाहिए, जो सामान्य मैग्नेटिक रेज़िस्टेंस दर्शाता है—इन सभी परीक्षणों से स्पष्ट हो जाएगा कि स्टेपर मोटर सही तरीके से कार्य कर रही है या नहीं।
2. स्टेपर मोटर ड्राइवर क्या होता है?
स्टेपर मोटर ड्राइवर एक इलेक्ट्रॉनिक कंट्रोल डिवाइस होता है जो कंट्रोलर (जैसे माइक्रोकंट्रोलर या PLC) से प्राप्त पल्स और डायरेक्शन सिग्नल को उपयुक्त करंट और वोल्टेज में परिवर्तित करके स्टेपर मोटर की कॉइल्स को क्रमबद्ध रूप से ऊर्जा प्रदान करता है, जिससे मोटर निर्धारित स्टेप्स में सटीक रूप से घूमती है; यह करंट लिमिटिंग, माइक्रोस्टेपिंग, ओवरकरंट और ओवरहीट प्रोटेक्शन जैसी सुविधाएँ प्रदान करता है तथा मोटर की स्मूथनेस, टॉर्क और पोज़िशनिंग एक्यूरेसी को नियंत्रित करने में महत्वपूर्ण भूमिका निभाता है।
3. क्या स्टेपर मोटर लगातार (Continuous) चल सकती है?
हाँ, स्टेपर मोटर लगातार चल सकती है, बशर्ते उसे निरंतर पल्स सिग्नल और उपयुक्त वोल्टेज-करंट सप्लाई मिलती रहे; स्टेपर मोटर प्रत्येक इनपुट पल्स पर एक निश्चित कोण से घूमती है, इसलिए यदि पल्स लगातार दिए जाएँ तो मोटर निरंतर रोटेशन करती रहेगी, हालांकि बहुत अधिक स्पीड पर टॉर्क कम हो सकता है और स्टेप लॉस की संभावना बढ़ सकती है, इसलिए सही ड्राइवर सेटिंग, करंट लिमिट और लोड कंडीशन का ध्यान रखना आवश्यक है ताकि मोटर स्थिर, स्मूथ और सुरक्षित रूप से लगातार चल सके।
4. स्टेपर मोटर की तारें कैसे पहचानें?
स्टेपर मोटर की तारें पहचानने के लिए सबसे पहले उसके प्रकार (बाइपोलर या युनिपोलर) को जानें; इसके बाद मल्टीमीटर से कॉइल टेस्ट करें—दोनों सिरों के बीच कम रेज़िस्टेंस दिखने वाले जोड़े एक कॉइल को दर्शाते हैं; बाइपोलर मोटर में आमतौर पर दो कॉइल्स होती हैं (कुल 4 तार), जबकि युनिपोलर में हर कॉइल का एक मध्य टेप होता है (कुल 5, 6 या 8 तार); मल्टीमीटर से निरंतरता जांचकर कॉइल जोड़े पहचाने और मैन्युअल या डेटा शीट के आधार पर ड्राइवर में सही क्रम से कनेक्ट करें; सही पहचान से मोटर का सही स्टेपिंग और टॉर्क सुनिश्चित होता है।
5. स्टेपर मोटर को मल्टीमीटर से कैसे जांचें?
स्टेपर मोटर को मल्टीमीटर से जांचने के लिए सबसे पहले मोटर के तारों को डिस्कनेक्ट करें और मल्टीमीटर को रेज़िस्टेंस (Ω) मोड में सेट करें; फिर प्रत्येक तार जोड़ी के बीच मापें—एक सामान्य बाइपोलर स्टेपर मोटर में दो कॉइल होती हैं और हर जोड़ी में कम रेज़िस्टेंस (कुछ ओहम्स) दिखना चाहिए; यदि कोई तार जोड़ी अनंत रेज़िस्टेंस दिखाए तो वह कॉइल टूटी हुई है; इसके अलावा किसी भी तार और मोटर बॉडी के बीच निरंतरता जांचें—यदि कनेक्शन है तो शॉर्ट है, जो सही नहीं है; इस तरह से आप यह पता लगा सकते हैं कि स्टेपर मोटर की कॉइल्स सही हैं या नुकसान हुई हैं।
धन्यवाद! हमें उम्मीद है कि यह पोस्ट ”Stepper Motor” आपके लिए जानकारीपूर्ण और मददगार रही होगी। अगर आपके कोई विचार, अनुभव या सवाल हैं, तो उन्हें नीचे कमेंट में शेयर करना न भूलें.