
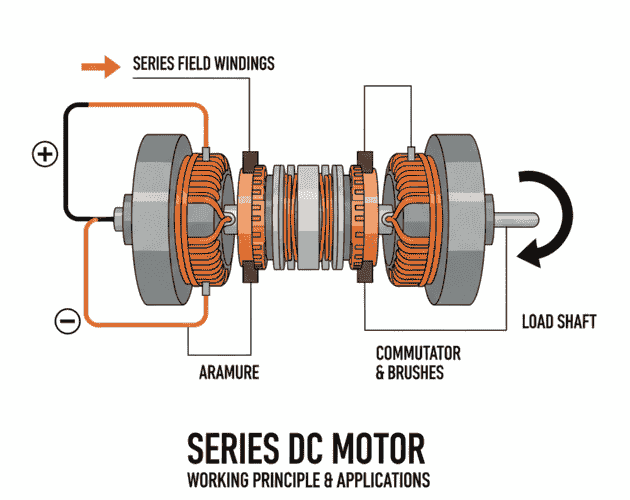
आधुनिक विद्युत इंजीनियरिंग में डीसी मोटर का एक महत्वपूर्ण स्थान है, विशेषकर वहाँ जहाँ उच्च प्रारंभिक टॉर्क (High Starting Torque) की आवश्यकता होती है। इन्हीं विशेष आवश्यकताओं को पूरा करने के लिए सीरीज डीसी मोटर (Series DC Motor) का व्यापक रूप से उपयोग किया जाता है। यह मोटर अपनी अनूठी संरचना और कार्यप्रणाली के कारण भारी लोड को आसानी से शुरू करने और संचालित करने में सक्षम होती है।
सीरीज डीसी मोटर में फील्ड वाइंडिंग और आर्मेचर वाइंडिंग को श्रेणी (Series) में जोड़ा जाता है, जिससे दोनों में समान धारा प्रवाहित होती है। यही विशेषता इसे अन्य डीसी मोटरों से अलग बनाती है और इसे अत्यधिक शक्तिशाली प्रारंभिक टॉर्क प्रदान करती है। इसी कारण इसका उपयोग इलेक्ट्रिक ट्रैक्शन सिस्टम, क्रेन, लिफ्ट, होइस्ट और भारी मशीनरी जैसे अनुप्रयोगों में किया जाता है।
इस लेख में हम सीरीज डीसी मोटर की परिभाषा, निर्माण, कार्य सिद्धांत, गति-टॉर्क विशेषताएँ, लाभ-हानि और उपयोग को सरल और स्पष्ट भाषा में समझेंगे। यह लेख छात्रों, तकनीकी पाठकों और प्रतियोगी परीक्षाओं की तैयारी करने वालों के लिए विशेष रूप से उपयोगी है
Table of Contents
सीरीज डीसी मोटर क्या है? (What Is Series DC Motor)
Series DC Motor (सीरीज डीसी मोटर) डीसी मोटर का वह प्रकार है जिसमें फील्ड वाइंडिंग और आर्मेचर वाइंडिंग को आपस में सीरीज़ (श्रृंखला) में जोड़ा जाता है। इसका सीधा अर्थ यह है कि एक ही विद्युत धारा फील्ड तथा आर्मेचर दोनों में प्रवाहित होती है। इसी विशेष विद्युत संयोजन के कारण मोटर में उत्पन्न चुंबकीय फ्लक्स आर्मेचर करंट पर निर्भर करता है, जिससे मोटर को विशिष्ट यांत्रिक गुण प्राप्त होते हैं।
डीसी मोटर मूलतः वह विद्युत मशीन है जो डायरेक्ट करंट (DC) को यांत्रिक ऊर्जा में परिवर्तित करती है। डीसी मोटरों को उनके फील्ड कनेक्शन के आधार पर विभिन्न प्रकारों—जैसे शंट, सीरीज और कंपाउंड, BLDC डीसी मोटर—में वर्गीकृत किया जाता है। इनमें सीरीज डीसी मोटर की विशेषता यह है कि इसकी फील्ड वाइंडिंग सीधे आर्मेचर वाइंडिंग के साथ जुड़ी होती है।
परिणामस्वरूप, स्टार्टिंग के समय जब धारा अधिक होती है, तो मोटर अत्यंत उच्च प्रारंभिक टॉर्क (High Starting Torque) उत्पन्न करती है। यही कारण है कि सीरीज डीसी मोटर को उन अनुप्रयोगों के लिए उपयुक्त माना जाता है जहाँ भारी भार को प्रारंभ करना आवश्यक होता है।
और पढ़ें: मोटर एन्कोडर (Motor Encoder) क्या होता है
डीसी सीरीज मोटर सर्किट आरेख (DC Series Motor Circuit Diagram)
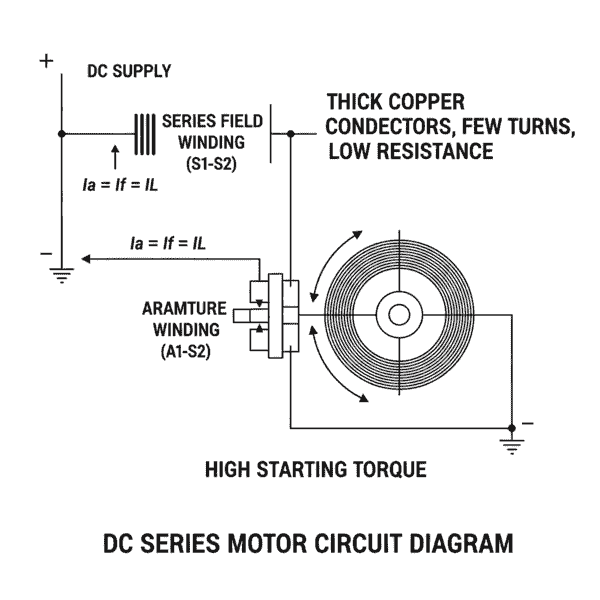
इस सर्किट को सीरीज डीसी मोटर कहा जाता है क्योंकि इसमें विद्युत धारा के प्रवाह के लिए केवल एक ही निरंतर मार्ग (Single Current Path) होता है। जब प्रत्यक्ष धारा (DC) प्रदान की जाती है, तो सबसे पहले धारा सीरीज फील्ड वाइंडिंग (S1–S2) से होकर गुजरती है और इसके बाद आर्मेचर वाइंडिंग (A1–A2) में प्रवेश करती है।
सीरीज फील्ड वाइंडिंग को मोटे तांबे के तारों से बनाया जाता है, क्योंकि इसमें से पूर्ण लोड करंट प्रवाहित होता है। मोटा कंडक्टर कम प्रतिरोध प्रदान करता है, जिससे I²R हानियाँ और अत्यधिक ताप (Overheating) से बचाव होता है तथा मजबूत चुंबकीय क्षेत्र उत्पन्न किया जा सके।
इन चुंबकीय क्षेत्रों की उच्च प्रबलता और सघनता आर्मेचर कंडक्टरों पर अत्यधिक विद्युत-चुंबकीय बल (Electromagnetic Force) उत्पन्न करती है, जिसके परिणामस्वरूप आर्मेचर शाफ्ट को अधिकतम संभव टॉर्क प्राप्त होता है। यह टॉर्क मोटर के स्टार्टिंग क्षण में विशेष रूप से अधिक होता है, क्योंकि उस समय आर्मेचर करंट अपने उच्चतम मान के निकट होता है।
इसी उच्च टॉर्क के प्रभाव से आर्मेचर प्रारंभिक अवस्था में ही भारी भार के विरुद्ध भी प्रभावी रूप से घूमना शुरू कर देता है और विद्युत ऊर्जा का यांत्रिक ऊर्जा में रूपांतरण तीव्रता और स्थिरता के साथ होने लगता है।
और पढ़ें: स्टार–डेल्टा स्टार्टर कैसे काम करता है
सीरीज डीसी मोटर का निर्माण (Construction of Series DC Motor)
सीरीज डीसी मोटर का निर्माण भले ही संरचनात्मक रूप से सरल दिखाई देता हो, लेकिन यांत्रिक (Mechanical) और विद्युत (Electrical) दोनों दृष्टियों से यह अत्यंत प्रभावी और संतुलित डिज़ाइन होता है। इस मोटर को विशेष रूप से उच्च प्रारंभिक टॉर्क (High Starting Torque) और भारी लोड परिस्थितियों में विश्वसनीय प्रदर्शन के लिए विकसित किया गया है। इसकी बनावट इस प्रकार तैयार की जाती है कि विद्युत ऊर्जा को अधिकतम दक्षता के साथ यांत्रिक ऊर्जा में बदला जा सके।
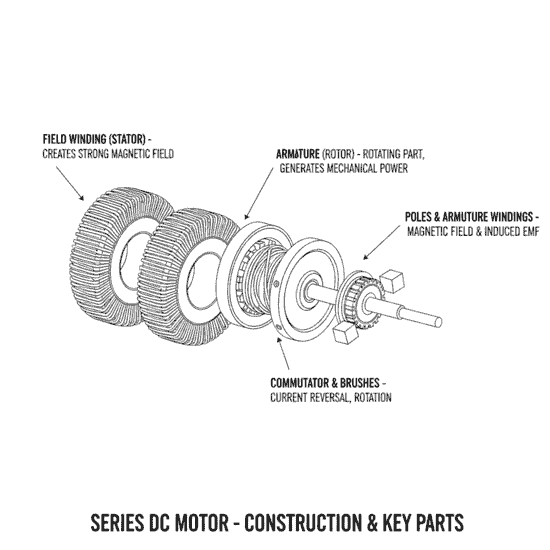
सीरीज डीसी मोटर के निर्माण में प्रयुक्त मुख्य भाग नीचे दिए गए हैं, जिनमें प्रत्येक घटक का अपना विशिष्ट विद्युत-यांत्रिक महत्व होता है और ये सभी मिलकर मोटर को शक्तिशाली, टिकाऊ और कार्यकुशल बनाते हैं।
1. योक (Yoke / Frame)
योक सीरीज डीसी मोटर का बाहरी ढांचा होता है, जिसे सामान्यतः कास्ट आयरन, कास्ट स्टील या रोल्ड स्टील से निर्मित किया जाता है। इसका प्राथमिक कार्य मोटर के सभी आंतरिक घटकों को यांत्रिक मजबूती, संरचनात्मक स्थिरता और बाहरी सुरक्षा प्रदान करना होता है।
इसके साथ-साथ योक एक चुंबकीय परिपथ (Magnetic Circuit) का भी महत्वपूर्ण हिस्सा होता है, क्योंकि यह चुंबकीय फ्लक्स के लिए कम रिलक्टेंस (Low Reluctance) वाला सतत मार्ग उपलब्ध कराता है। परिणामस्वरूप फ्लक्स लीकेज कम होता है और मोटर की कुल दक्षता एवं विश्वसनीयता में सुधार होता है।
2. फील्ड पोल एवं पोल शू (Field Poles and Pole Shoes)
फील्ड पोल, योक के अंदर मजबूती से लगाए जाते हैं और इन्हीं पर सीरीज फील्ड वाइंडिंग लपेटी जाती है। ये पोल आमतौर पर लेमिनेटेड सॉफ्ट आयरन या स्टील से बने होते हैं ताकि एडी करंट लॉस को कम किया जा सके।
पोल शू का मुख्य कार्य चुंबकीय फ्लक्स को विस्तृत और समान रूप से फैलाना होता है, जिससे आर्मेचर की सतह पर फ्लक्स का वितरण संतुलित रहता है। इससे स्पार्किंग में कमी, बेहतर कम्यूटेशन और मोटर का स्थिर एवं सुचारू संचालन सुनिश्चित होता है।
3. सीरीज फील्ड वाइंडिंग (Series Field Winding)
सीरीज फील्ड वाइंडिंग मोटे तांबे के तार से बनाई जाती है और इसमें कम टर्न (Turns) होते हैं। इसका कारण यह है कि इस वाइंडिंग में से आर्मेचर का पूरा करंट प्रवाहित होता है, इसलिए इसका प्रतिरोध बहुत कम रखा जाता है। जैसे-जैसे लोड बढ़ता है, करंट भी बढ़ता है और उसी अनुपात में चुंबकीय फ्लक्स तीव्र हो जाता है।
यही विशेषता सीरीज डीसी मोटर को अत्यधिक उच्च प्रारंभिक टॉर्क (Very High Starting Torque) प्रदान करती है, जिसके कारण इसका उपयोग क्रेन, होइस्ट, ट्रैक्शन और भारी औद्योगिक मशीनों में व्यापक रूप से किया जाता है।
4. आर्मेचर कोर (Armature Core)
आर्मेचर कोर सीरीज डीसी मोटर का मुख्य घूमने वाला (Rotating) भाग होता है, जिसे उच्च गुणवत्ता वाली सिलिकॉन स्टील की पतली लैमिनेटेड शीट्स से बनाया जाता है। इन लैमिनेशन का प्राथमिक उद्देश्य एडी करंट हानि (Eddy Current Loss) और उससे उत्पन्न अनावश्यक ऊष्मा को कम करना होता है, जिससे मोटर की दक्षता और थर्मल परफॉर्मेंस बेहतर होती है।
आर्मेचर कोर की सतह पर विशेष रूप से डिज़ाइन किए गए स्लॉट्स बनाए जाते हैं, जिनमें आर्मेचर वाइंडिंग रखी जाती है। यह संरचना चुंबकीय फ्लक्स के प्रभावी संचरण और संतुलित यांत्रिक मजबूती दोनों को सुनिश्चित करती है।
5. आर्मेचर वाइंडिंग (Armature Winding)
आर्मेचर वाइंडिंग उच्च शुद्धता वाले तांबे (Copper) के इन्सुलेटेड तारों से निर्मित होती है और इसे आर्मेचर कोर के स्लॉट्स में सावधानीपूर्वक व्यवस्थित किया जाता है। यही वह भाग है जहाँ मोटर की वास्तविक ऊर्जा रूपांतरण प्रक्रिया होती है।
जब आर्मेचर वाइंडिंग में धारा प्रवाहित होती है और वह फील्ड पोल द्वारा उत्पन्न चुंबकीय क्षेत्र के संपर्क में आती है, तो फ्लेमिंग के बाएँ हाथ के नियम (Fleming’s Left Hand Rule) के अनुसार आर्मेचर पर घूर्णन बल (Torque) उत्पन्न होता है। यह प्रक्रिया विद्युत ऊर्जा को प्रभावी रूप से यांत्रिक ऊर्जा में बदल देती है, जिससे मोटर सुचारू रूप से घूमती है।
6. कम्यूटेटर (Commutator)
कम्यूटेटर एक बेलनाकार यांत्रिक-विद्युत घटक होता है, जो कई तांबे के खंडों (Copper Segments) से मिलकर बना होता है और आर्मेचर शाफ्ट पर स्थापित रहता है। प्रत्येक सेगमेंट को एक-दूसरे से माइका (Mica) द्वारा इन्सुलेट किया जाता है।
इसका मुख्य कार्य आर्मेचर वाइंडिंग में प्रवाहित धारा की दिशा को हर आधे चक्र में बदलना होता है, ताकि आर्मेचर पर उत्पन्न टॉर्क की दिशा स्थिर बनी रहे और मोटर निरंतर एक ही दिशा में घूमती रहे। इस प्रकार कम्यूटेटर, सीरीज डीसी मोटर में यांत्रिक कम्यूटेशन की भूमिका निभाते हुए निरंतर और नियंत्रित रोटेशन सुनिश्चित करता है।
7. कार्बन ब्रश (Carbon Brushes)
कार्बन ब्रश सीरीज डीसी मोटर का एक अत्यंत महत्वपूर्ण विद्युत-संपर्क (Electrical Contact) घटक होता है, जो सामान्यतः ग्रेफाइट, कार्बन या कार्बन–ग्रेफाइट मिश्रधातु से निर्मित किया जाता है। इन्हें स्प्रिंग के माध्यम से कम्यूटेटर की सतह पर नियंत्रित दबाव के साथ रखा जाता है, ताकि निरंतर और विश्वसनीय संपर्क बना रहे।
कार्बन ब्रश का मुख्य कार्य बाहरी डीसी सप्लाई से विद्युत धारा को कम्यूटेटर तक पहुँचाना और वहाँ से आर्मेचर वाइंडिंग तथा सीरीज फील्ड वाइंडिंग में प्रवाहित करना होता है।
ब्रश सामग्री का चयन विशेष रूप से इस प्रकार किया जाता है कि घर्षण (Friction), स्पार्किंग (Sparking) और कम्यूटेटर घिसाव न्यूनतम रहे। कार्बन आधारित सामग्री न केवल अच्छी विद्युत चालकता प्रदान करती है, बल्कि यह स्वयं एक स्नेहक (Self-Lubricating) की तरह भी कार्य करती है, जिससे कम्यूटेटर की सतह सुरक्षित रहती है।
और पढ़ें: फेज़ सीक्वेंस (Phase Sequence) क्या होता है?
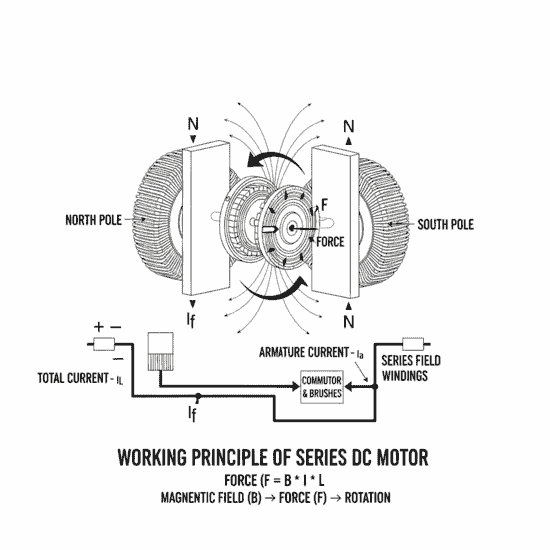
सीरीज डीसी मोटर का कार्य सिद्धांत (Working Principle of Series DC Motor)
सीरीज डीसी मोटर का कार्य सिद्धांत मूलतः इलेक्ट्रोमैग्नेटिक बल पर आधारित होता है, जिसे सामान्य रूप से Fleming’s Left Hand Rule द्वारा समझाया जाता है। यह सिद्धांत बताता है कि जब किसी धारावाही चालक को चुंबकीय क्षेत्र में रखा जाता है, तो उस पर एक यांत्रिक बल कार्य करता है, जिससे चालक गति करने लगता है। यही सिद्धांत सीरीज डीसी मोटर के घूमने का आधार है।
सीरीज डीसी मोटर में फील्ड वाइंडिंग और आर्मेचर वाइंडिंग आपस में श्रृंखला (Series) में जुड़ी होती हैं। इस कारण फील्ड करंट और आर्मेचर करंट समान होते हैं, अर्थात:
𝐼𝑠𝑒 =𝐼𝑎
सीरीज डीसी मोटर कार्यप्रणाली का क्रमबद्ध वर्णन
जब मोटर को डीसी विद्युत आपूर्ति दी जाती है, तो धारा सबसे पहले सीरीज फील्ड वाइंडिंग से होकर गुजरती है और उसे तीव्र रूप से चुम्बकित कर देती है। इसके पश्चात वही धारा आर्मेचर वाइंडिंग में प्रवेश करती है। फील्ड वाइंडिंग द्वारा उत्पन्न चुंबकीय फ्लक्स और आर्मेचर कंडक्टरों में बहने वाली धारा के बीच परस्पर क्रिया होती है।
इस परस्पर क्रिया के परिणामस्वरूप आर्मेचर कंडक्टरों पर Lorentz बल उत्पन्न होता है, जो आर्मेचर को घूर्णन गति प्रदान करता है। आर्मेचर के घूमने के साथ-साथ कम्यूटेटर करंट की दिशा को उचित समय पर बदलता रहता है, जिससे मोटर निरंतर एक ही दिशा में घूमती रहती है।
सीरीज डीसी मोटर में उच्च प्रारंभिक टॉर्क का कारण (Reason for High Starting Torque in Series DC Motor)
सीरीज डीसी मोटर की सबसे प्रमुख और विशिष्ट विशेषता इसका अत्यधिक उच्च प्रारंभिक टॉर्क (Very High Starting Torque) है, जो इसे भारी भार वाले अनुप्रयोगों के लिए अत्यंत उपयुक्त बनाता है। स्टार्टिंग के समय मोटर की गति शून्य होती है, इसलिए आर्मेचर में बैक EMF (Back Electromotive Force) विकसित नहीं हो पाता। इस स्थिति में मोटर द्वारा लिया गया करंट बहुत अधिक होता है।
चूँकि सीरीज डीसी मोटर में फील्ड वाइंडिंग और आर्मेचर वाइंडिंग श्रेणी (Series) में जुड़ी होती हैं, इसलिए फील्ड फ्लक्स (Φ) सीधे आर्मेचर करंट (Ia) के अनुपात में होता है। जैसे-जैसे करंट बढ़ता है, वैसे-वैसे चुंबकीय फ्लक्स भी तीव्र होता जाता है। टॉर्क का गणितीय संबंध
T ∝ Φ × Ia
से स्पष्ट होता है कि जब Φ और Ia दोनों ही बड़े मान के होते हैं, तब उत्पन्न टॉर्क असाधारण रूप से अधिक हो जाता है।
सीरीज डीसी मोटर में स्पीड और लोड का संबंध (Speed–Load Characteristics of Series DC Motor)
सीरीज डीसी मोटर में गति (Speed) और लोड (Load) के बीच संबंध अत्यंत विशिष्ट और व्यावहारिक दृष्टि से बहुत महत्वपूर्ण होता है। जब मोटर पर लोड बढ़ता है, तो उसे अधिक टॉर्क उत्पन्न करने की आवश्यकता होती है। इस मांग को पूरा करने के लिए आर्मेचर करंट (Ia) स्वतः बढ़ जाता है। चूँकि सीरीज डीसी मोटर में फील्ड वाइंडिंग आर्मेचर के साथ श्रेणी में जुड़ी होती है, इसलिए करंट बढ़ने के साथ ही फील्ड फ्लक्स (Φ) भी सशक्त हो जाता है।
मजबूत चुंबकीय फ्लक्स के कारण मोटर का टॉर्क तीव्र रूप से बढ़ता है, लेकिन इसी के साथ आर्मेचर में विकसित बैक EMF बदल जाता है, जिससे मोटर की गति घटने लगती है। यही कारण है कि भारी लोड की स्थिति में सीरीज डीसी मोटर कम गति पर लेकिन अत्यधिक बल के साथ कार्य करती है।
इसके विपरीत, जब मोटर पर लोड बहुत कम या लगभग शून्य होता है, तो आर्मेचर करंट घट जाता है, फलस्वरूप फील्ड फ्लक्स कमजोर हो जाता है। कमजोर फ्लक्स के कारण मोटर की गति अत्यधिक बढ़ सकती है।
सावधानी – नो-लोड कंडीशन (No-Load Condition in Series DC Motor)
सीरीज डीसी मोटर को बिना लोड (No-Load Condition) कभी भी संचालित नहीं करना चाहिए, क्योंकि यह स्थिति मोटर के लिए अत्यंत खतरनाक और विनाशकारी हो सकती है। नो-लोड अवस्था में मोटर को घुमाने के लिए बहुत कम टॉर्क की आवश्यकता होती है, जिसके कारण आर्मेचर करंट काफी घट जाता है। चूँकि सीरीज डीसी मोटर में फील्ड फ्लक्स सीधे आर्मेचर करंट पर निर्भर करता है, इसलिए करंट कम होते ही फील्ड फ्लक्स अत्यधिक कमजोर हो जाता है।
गति का संबंध N ∝ V / Φ से स्पष्ट होता है कि जब फ्लक्स (Φ) घटता है, तो मोटर की गति असामान्य रूप से बढ़ जाती है। यह गति इतनी अधिक हो सकती है कि मोटर मैकेनिकल लिमिट से बाहर चली जाए, जिससे आर्मेचर वाइंडिंग, कम्यूटेटर, बेयरिंग और शाफ्ट को गंभीर क्षति पहुँच सकती है। अत्यधिक स्पीड के कारण वाइब्रेशन, ओवरहीटिंग और कम्यूटेटर स्पार्किंग भी बढ़ जाती है।
और पढ़ें: पावर फैक्टर क्या होता है पूरी जानकारी
डीसी सीरीज मोटर की गति नियंत्रण (Speed Control of DC Series Motor)
डीसी सीरीज मोटर की गति नियंत्रण एक महत्वपूर्ण विषय है, क्योंकि यह मोटर उच्च प्रारंभिक टॉर्क और व्यापक गति-परिवर्तन क्षमता के लिए जानी जाती है। व्यावहारिक रूप से, सीरीज डीसी मोटर की गति को आर्मेचर वोल्टेज या फील्ड फ्लक्स में परिवर्तन करके नियंत्रित किया जाता है। चूँकि मोटर की गति निम्न संबंध का पालन करती है:
N ∝ Eb / φ
अर्थात गति (N) बैक ईएमएफ (Eb) के समानुपाती तथा फ्लक्स (φ) के व्युत्क्रमानुपाती होती है। इसी सिद्धांत के आधार पर गति नियंत्रण की विधियाँ विकसित की गई हैं। डीसी सीरीज मोटर की गति को मुख्य रूप से निम्न दो विधियों द्वारा नियंत्रित किया जाता है:
- फील्ड फ्लक्स नियंत्रण विधि (Field Flux Control Method)
- आर्मेचर प्रतिरोध नियंत्रण विधि (Armature Resistance Control Method)
इन दोनों विधियों का उपयोग अलग-अलग परिस्थितियों में किया जाता है, जहाँ आवश्यक गति सामान्य गति से अधिक या कम होती है।
1. फील्ड फ्लक्स नियंत्रण विधि (Field Flux Control Method)
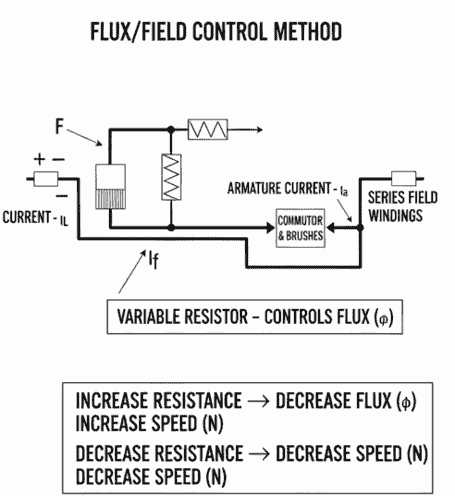
यह विधि इस सिद्धांत पर आधारित है कि यदि सीरीज डीसी मोटर में फील्ड फ्लक्स को कम कर दिया जाए, तो मोटर की गति बढ़ जाती है। क्योंकि:
N ∝ 1 / φ
इस विधि का उपयोग मुख्यतः रेटेड गति से अधिक गति प्राप्त करने के लिए किया जाता है। फील्ड फ्लक्स को बदलने के लिए निम्न तकनीकों का प्रयोग किया जाता है:
(a) फील्ड डायवर्टर विधि (Field Diverter Method)
इस विधि में सीरीज फील्ड वाइंडिंग के समानांतर एक परिवर्तनीय प्रतिरोध (Field Diverter) जोड़ा जाता है। यह प्रतिरोध लाइन करंट के एक भाग को फील्ड वाइंडिंग से शंट कर देता है, जिससे फील्ड करंट कम हो जाता है। परिणामस्वरूप चुंबकीय फ्लक्स घटता है और मोटर की गति बढ़ जाती है।
यह विधि केवल सामान्य गति से अधिक गति प्रदान करती है और इसका उपयोग प्रायः कर्षण प्रणालियों (Traction Applications) जैसे क्रेन और इलेक्ट्रिक ट्रेनों में किया जाता है।
(b) टैप्ड फील्ड कंट्रोल (Tapped Field Control)
इस विधि में सीरीज फील्ड वाइंडिंग में घुमावों (Turns) की संख्या कम कर दी जाती है। फील्ड वाइंडिंग के कुछ हिस्सों को स्विच की सहायता से शॉर्ट कर दिया जाता है, जिससे फ्लक्स घटता है और मोटर की गति बढ़ जाती है।
पूर्ण फील्ड वाइंडिंग के साथ मोटर सामान्य गति से चलती है, जबकि कम टर्न्स पर मोटर सामान्य गति से अधिक गति प्राप्त करती है।
(c) सीरीज-पैरेलल फील्ड कंट्रोल
इस विधि में फील्ड कॉइल्स को आवश्यकतानुसार सीरीज या पैरेलल में जोड़ा जाता है। पैरेलल कनेक्शन से फ्लक्स कम होता है, जिससे मोटर की गति बढ़ जाती है। यह विधि विशेष रूप से बहु-फील्ड कॉइल वाले मोटरों में उपयोगी होती है।
2. आर्मेचर प्रतिरोध नियंत्रण विधि (Armature Resistance Control Method)
आर्मेचर प्रतिरोध नियंत्रण विधि, डीसी सीरीज मोटर की सबसे सरल, पारंपरिक और व्यापक रूप से प्रयुक्त गति नियंत्रण तकनीक मानी जाती है। इस विधि में आर्मेचर के साथ श्रृंखला (Series) में एक बाहरी परिवर्तनीय प्रतिरोध, जिसे सामान्यतः रियोस्टैट (Rheostat) कहा जाता है, जोड़ा जाता है। इसका उद्देश्य आर्मेचर को मिलने वाले प्रभावी वोल्टेज को नियंत्रित करना होता है।
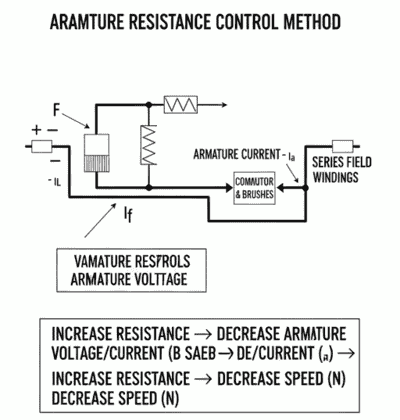
जब यह अतिरिक्त प्रतिरोध सर्किट में जोड़ा जाता है, तो सप्लाई वोल्टेज का एक भाग उसी प्रतिरोध में गिर जाता है। परिणामस्वरूप आर्मेचर के पार उपलब्ध वोल्टेज कम हो जाता है, जिससे बैक EMF घटता है और मोटर की गति नियंत्रित रूप से कम हो जाती है। परिवर्तनीय प्रतिरोध के मान को बदलकर, मोटर की गति को रेटेड स्पीड से कम किसी भी आवश्यक स्तर तक समायोजित किया जा सकता है।
हालाँकि इस विधि की एक प्रमुख सीमा यह है कि अतिरिक्त प्रतिरोध में I²R हानि के रूप में शक्ति नष्ट होती है, जिससे दक्षता कम हो जाती है और ऊष्मा उत्पन्न होती है। इसके बावजूद, इसकी सरल संरचना, कम लागत, आसान कार्यान्वयन और विश्वसनीय नियंत्रण के कारण यह विधि आज भी उन अनुप्रयोगों में व्यापक रूप से उपयोग की जाती है.
और पढ़ें: केबल कितने प्रकार का होता है पूरी जानकारी
डीसी सीरीज मोटर की गति–टॉर्क विशेषताएँ (Speed–Torque Characteristics of DC Series Motor)
डीसी सीरीज मोटर की गति–टॉर्क विशेषताएँ इसके सबसे महत्वपूर्ण और विशिष्ट गुणों में से एक हैं। इन्हीं विशेषताओं के कारण यह मोटर भारी प्रारंभिक भार (Heavy Starting Load) वाले अनुप्रयोगों में व्यापक रूप से उपयोग की जाती है। सीरीज डीसी मोटर के व्यवहार को समझने के लिए सामान्यतः तीन प्रमुख वक्र (Characteristics Curves) माने जाते हैं:
- टॉर्क बनाम आर्मेचर करंट (Torque vs Armature Current)
- गति बनाम आर्मेचर करंट (Speed vs Armature Current)
- गति बनाम टॉर्क (Speed vs Torque)
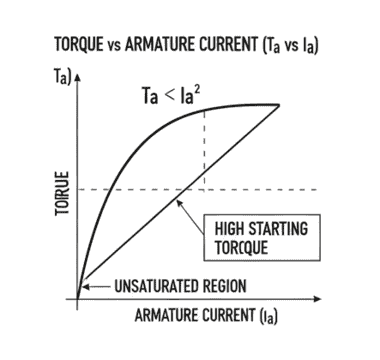
1. टॉर्क बनाम आर्मेचर करंट विशेषता (Torque–Armature Current Characteristic of Series DC Motor)
सीरीज डीसी मोटर में फील्ड वाइंडिंग और आर्मेचर वाइंडिंग श्रृंखला (Series) में जुड़ी होती हैं, इसलिए दोनों में प्रवाहित होने वाला करंट समान होता है। इसे गणितीय रूप से इस प्रकार व्यक्त किया जा सकता है:
If = Ia
चूँकि सीरीज डीसी मोटर में फील्ड फ्लक्स (Φ) सीधे आर्मेचर करंट पर निर्भर करता है, इसलिए फ्लक्स और करंट का संबंध इस प्रकार होता है:
Φ ∝ Ia
डीसी मोटर के लिए टॉर्क का सामान्य समीकरण है:
T ∝ Φ × Ia
जब इसमें Φ का मान स्थापित किया जाता है, तो प्राप्त होता है:
T ∝ Ia × Ia या T ∝ Ia²
इससे स्पष्ट होता है कि सीरीज डीसी मोटर का टॉर्क आर्मेचर करंट के वर्ग के समानुपाती होता है। यही इसकी सबसे महत्वपूर्ण विशेषता है। स्टार्टिंग के समय बैक EMF शून्य या बहुत कम होता है, जिसके कारण आर्मेचर करंट अत्यधिक बढ़ जाता है। चूँकि टॉर्क करंट के वर्ग पर निर्भर करता है, इसलिए मोटर प्रारंभिक अवस्था में असाधारण रूप से उच्च टॉर्क उत्पन्न करती है।
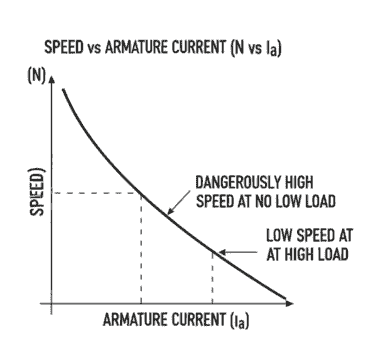
2. गति बनाम आर्मेचर करंट विशेषता (Speed–Armature Current Characteristic of Series DC Motor)
सीरीज डीसी मोटर में गति (Speed) और आर्मेचर करंट (Armature Current) के बीच संबंध को समझने के लिए पहले बैक ईएमएफ (Back EMF) के समीकरण को देखना आवश्यक है। डीसी मोटर के लिए बैक ईएमएफ का सामान्य समीकरण इस प्रकार होता है:
Eb = (P × Φ × Z × N) / (60 × A)
जहाँ P = पोलों की संख्या, Φ = प्रति पोल फ्लक्स, Z = आर्मेचर कंडक्टरों की संख्या, N = मोटर की गति (rpm) और A = समानांतर पथों की संख्या। किसी विशेष मोटर के लिए P, Z और A स्थिर रहते हैं, इसलिए गति का संबंध सरल रूप में लिखा जा सकता है:
N ∝ Eb / Φ
सीरीज डीसी मोटर में जैसे-जैसे आर्मेचर करंट (Ia) बढ़ता है, वैसे-वैसे फील्ड फ्लक्स (Φ) भी बढ़ता है, क्योंकि फील्ड वाइंडिंग और आर्मेचर वाइंडिंग श्रृंखला में जुड़ी होती हैं। फ्लक्स के बढ़ने से उपरोक्त समीकरण के अनुसार गति (N) में तीव्र गिरावट आती है। यही कारण है कि जब मोटर पर लोड बढ़ता है और करंट बढ़ता है, तब सीरीज डीसी मोटर की गति तेजी से कम हो जाती है।
यह विशेषता दर्शाती है कि सीरीज डीसी मोटर भारी लोड पर कम गति और उच्च टॉर्क प्रदान करती है, जबकि हल्के लोड पर इसकी गति बहुत अधिक हो सकती है।
3. गति बनाम टॉर्क विशेषता (Speed–Torque Characteristic of Series DC Motor)
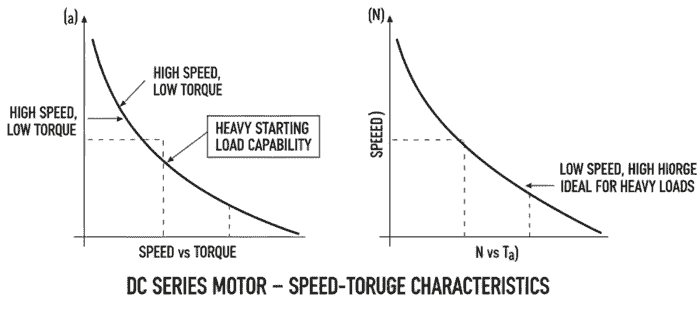
सीरीज डीसी मोटर की गति–टॉर्क विशेषता उसके विशिष्ट व्यवहार को स्पष्ट रूप से दर्शाती है। जैसा कि पहले स्थापित किया जा चुका है, सीरीज डीसी मोटर में टॉर्क और आर्मेचर करंट के बीच संबंध निम्न प्रकार होता है:
T ∝ Ia²
इससे यह निष्कर्ष निकलता है कि:
Ia ∝ √T
वहीं दूसरी ओर, सीरीज डीसी मोटर की गति का संबंध फील्ड फ्लक्स से होता है और चूँकि फील्ड फ्लक्स आर्मेचर करंट के समानुपाती होता है, इसलिए गति को इस प्रकार लिखा जा सकता है:
N ∝ 1 / Φ
और चूँकि Φ ∝ Ia, अतः:
N ∝ 1 / Ia
अब जब Ia के मान को टॉर्क के रूप में स्थापित किया जाता है, तो प्राप्त होता है:
N ∝ 1 / √T
इससे स्पष्ट होता है कि जैसे-जैसे टॉर्क बढ़ता है, मोटर की गति तीव्रता से घटती जाती है। यही कारण है कि सीरीज डीसी मोटर में स्पीड रेगुलेशन खराब माना जाता है, क्योंकि लोड में थोड़े से परिवर्तन पर भी गति में बड़ा अंतर आ जाता है।
हालाँकि यह विशेषता इसे स्थिर गति अनुप्रयोगों के लिए अनुपयुक्त बनाती है, लेकिन यही गुण सीरीज डीसी मोटर को भारी लोड, उच्च प्रारंभिक टॉर्क और ट्रैक्शन आधारित प्रणालियों जैसे क्रेन, होइस्ट और इलेक्ट्रिक ट्रेनों के लिए अत्यंत प्रभावी और उपयोगी बनाता है।
और पढ़ें: सॉफ्ट स्टार्टर (Soft Starter) क्या है?
सीरीज डीसी मोटर बनाम शंट डीसी मोटर बनाम कंपाउंड डीसी मोटर
डीसी मोटरों का चयन करते समय स्पीड रेगुलेशन, स्टार्टिंग टॉर्क और अनुप्रयोग क्षेत्र सबसे महत्वपूर्ण मापदंड होते हैं। अलग–अलग प्रकार की डीसी मोटरें इन गुणों में भिन्न व्यवहार करती हैं। नीचे दी गई तालिका (Table) के माध्यम से सीरीज, शंट और कंपाउंड डीसी मोटरों की तुलनात्मक विशेषताओं को सरल और स्पष्ट रूप में प्रस्तुत किया गया है, जिससे उनके उपयोग को आसानी से समझा जा सके।
| मोटर का प्रकार | स्पीड रेगुलेशन | स्टार्टिंग टॉर्क | प्रमुख अनुप्रयोग |
|---|---|---|---|
| सीरीज डीसी मोटर | खराब | बहुत उच्च | क्रेन, होइस्ट, ट्रैक्शन, इलेक्ट्रिक ट्रेन |
| शंट डीसी मोटर | बहुत अच्छा | मध्यम | लेथ मशीन, फैन, ब्लोअर |
| कंपाउंड डीसी मोटर (Cumulative) | मध्यम | उच्च | एलेवेटर, प्रेस मशीन |
| कंपाउंड डीसी मोटर (Differential) | अच्छा | कम | विशेष औद्योगिक उपयोग |
| सेपरेटली एक्साइटेड डीसी मोटर | उत्कृष्ट | मध्यम | सटीक स्पीड कंट्रोल सिस्टम |
यह तुलना स्पष्ट करती है कि सीरीज डीसी मोटर वहाँ सर्वोत्तम है जहाँ अत्यधिक प्रारंभिक टॉर्क की आवश्यकता होती है, जबकि शंट और सेपरेटली एक्साइटेड डीसी मोटरें बेहतर स्पीड नियंत्रण के लिए अधिक उपयुक्त होती हैं।
सीरीज डीसी मोटर के फायदे (Advantages)
सीरीज डीसी मोटर को विशेष रूप से उन परिस्थितियों के लिए डिज़ाइन किया गया है जहाँ उच्च प्रारंभिक शक्ति और मजबूत यांत्रिक प्रदर्शन की आवश्यकता होती है। इसके प्रमुख फायदे निम्नलिखित हैं:
- अत्यधिक स्टार्टिंग टॉर्क – आर्मेचर करंट के वर्ग के समानुपाती टॉर्क के कारण यह मोटर भारी लोड को आसानी से स्टार्ट कर सकती है।
- सरल और किफायती डिज़ाइन – संरचना सरल होने के कारण इसका निर्माण और रख-रखाव अपेक्षाकृत सस्ता होता है।
- भारी लोड के लिए उपयुक्त – उच्च टॉर्क विशेषता इसे क्रेन, होइस्ट और ट्रैक्शन जैसे अनुप्रयोगों के लिए आदर्श बनाती है।
- कम यांत्रिक जटिलता – अन्य डीसी मोटरों की तुलना में इसका भौतिक निर्माण सरल होता है, जिससे विश्वसनीयता बढ़ती है।
सीरीज डीसी मोटर के नुकसान (Disadvantages)
जहाँ सीरीज डीसी मोटर के कई महत्वपूर्ण लाभ हैं, वहीं कुछ सीमाएँ भी हैं जिन्हें नजरअंदाज नहीं किया जा सकता:
- स्पीड रेगुलेशन कमजोर – लोड में छोटे से परिवर्तन पर भी गति में बड़ा अंतर आ जाता है।
- बिना लोड संचालन खतरनाक – नो-लोड स्थिति में मोटर अत्यधिक गति (Runaway) प्राप्त कर सकती है, जिससे क्षति की संभावना होती है।
- RPM बढ़ने पर टॉर्क में कमी – जैसे-जैसे मोटर की गति बढ़ती है, फील्ड फ्लक्स घटता है और टॉर्क कम हो जाता है।
- स्पीड नियंत्रण जटिल – सटीक गति नियंत्रण के लिए अतिरिक्त सर्किट या इलेक्ट्रॉनिक नियंत्रण प्रणाली की आवश्यकता पड़ती है।
सीरीज डीसी मोटर के अनुप्रयोग (Applications of Series DC Motor)
सीरीज डीसी मोटर मोटर की गति लोड पर निर्भर होती है, इसलिए यह स्थिर गति वाले अनुप्रयोगों के लिए उपयुक्त नहीं मानी जाती, लेकिन जहाँ शक्ति, टॉर्क और विश्वसनीयता प्राथमिकता होती है, वहाँ इसका प्रदर्शन अत्यंत प्रभावी सिद्ध होता है। इसके प्रमुख व्यावहारिक अनुप्रयोग निम्नलिखित हैं:
- इलेक्ट्रिक ट्रेन और ट्रैक्शन सिस्टम – अत्यधिक उच्च प्रारंभिक टॉर्क के कारण भारी रेल वाहनों को शून्य गति से चलायमान करने के लिए सीरीज डीसी मोटर का लंबे समय से व्यापक उपयोग किया जाता रहा है।
- लिफ्ट और क्रेन ड्राइव्स – भारी भार को सुरक्षित रूप से ऊपर उठाने और नियंत्रित रूप से नीचे लाने के लिए आवश्यक शक्तिशाली टॉर्क प्रदान करती है।
- होइस्ट सिस्टम – निर्माण स्थलों और औद्योगिक संयंत्रों में भारी लोड को उठाने हेतु विश्वसनीय और मजबूत प्रदर्शन देती है।
- स्टार्टर मोटर्स (कुछ वाहन) – आंतरिक दहन इंजन (IC Engine) को प्रारंभ करने के लिए अल्प समय में अत्यधिक टॉर्क की आवश्यकता होती है, जिसे सीरीज डीसी मोटर अत्यंत प्रभावी ढंग से प्रदान करती है।
- हेवी-ड्यूटी औद्योगिक मशीनरी ड्राइव्स – जैसे रोलिंग मिल, प्रेस मशीन, कन्वेयर प्रारंभिक ड्राइव और अन्य भारी यांत्रिक प्रणालियाँ, जहाँ उच्च टॉर्क और मजबूत संरचना अनिवार्य होती है।
अक्सर पूछे जाने वाले सवाल (FAQ)
1. सीरीज डीसी मोटर कहाँ उपयोग होती है?
सीरीज डीसी मोटर का उपयोग वहाँ किया जाता है जहाँ भारी लोड को स्टार्ट करने के लिए उच्च प्रारंभिक टॉर्क की आवश्यकता होती है। इसी कारण इसका प्रयोग इलेक्ट्रिक ट्रेन और ट्रैक्शन सिस्टम, लिफ्ट, क्रेन, होइस्ट, वाहन स्टार्टर्स और भारी औद्योगिक मशीनों में किया जाता है, जहाँ शक्तिशाली और भरोसेमंद स्टार्टिंग प्रदर्शन आवश्यक होता है।
2. सीरीज डीसी मोटर कैसे काम करती है?
सीरीज डीसी मोटर में फील्ड वाइंडिंग और आर्मेचर वाइंडिंग श्रृंखला (Series) में जुड़ी होती हैं, इसलिए दोनों में समान करंट प्रवाहित होता है। जब डीसी सप्लाई दी जाती है, तो करंट पहले सीरीज फील्ड वाइंडिंग से होकर गुजरता है और एक मजबूत चुंबकीय क्षेत्र उत्पन्न करता है, फिर आर्मेचर वाइंडिंग में प्रवेश करता है। इस चुंबकीय क्षेत्र और आर्मेचर करंट की पारस्परिक क्रिया से आर्मेचर पर टॉर्क उत्पन्न होता है, जिससे शाफ्ट घूमने लगता है। लोड बढ़ने पर करंट और फ्लक्स बढ़ते हैं, जिससे टॉर्क भी बढ़ जाता है—यही कारण है कि सीरीज डीसी मोटर भारी लोड को आसानी से स्टार्ट कर पाती है।
3. डीसी सीरीज मोटर की घूर्णन दिशा (Rotation) कैसे बदली जाती है?
डीसी सीरीज मोटर की घूर्णन दिशा बदलने के लिए या तो आर्मेचर के कनेक्शन को उलटना होता है या फील्ड वाइंडिंग के कनेक्शन को, लेकिन दोनों को एक साथ नहीं। ऐसा इसलिए क्योंकि मोटर की दिशा आर्मेचर करंट और फील्ड फ्लक्स की आपसी दिशा पर निर्भर करती है। यदि दोनों को एक साथ उलट दिया जाए, तो आपसी संबंध वही रहता है और मोटर की दिशा नहीं बदलती।
सबसे सामान्य और सुरक्षित तरीका यह है कि आर्मेचर (A1–A2) या सीरीज फील्ड (S1–S2) में से किसी एक के टर्मिनल बदल दिए जाएँ। इससे चुंबकीय क्षेत्र और करंट की सापेक्ष दिशा बदल जाती है, परिणामस्वरूप मोटर की घूर्णन दिशा भी उलट जाती है।
4. डीसी सीरीज मोटर ट्रैक्शन में क्यों उपयोग की जाती है?
डीसी सीरीज मोटर का उपयोग ट्रैक्शन सिस्टम (जैसे इलेक्ट्रिक ट्रेन, ट्राम और मेट्रो) में इसलिए किया जाता है क्योंकि यह अत्यधिक उच्च प्रारंभिक टॉर्क प्रदान करती है, जो भारी रेल वाहनों को शून्य गति से चलाने के लिए आवश्यक होता है। इस मोटर में लोड बढ़ने पर करंट और फील्ड फ्लक्स स्वतः बढ़ जाते हैं, जिससे टॉर्क भी बढ़ता है और ट्रेन भारी भार के बावजूद आसानी से गति पकड़ लेती है। इसके अतिरिक्त, सीरीज डीसी मोटर ओवरलोड सहन करने की अच्छी क्षमता, सरल नियंत्रण और मजबूत निर्माण प्रदान करती है, जो ट्रैक्शन जैसी भारी और निरंतर कार्य परिस्थितियों के लिए इसे अत्यंत उपयुक्त बनाती है
5. DC Series Motor के लिए कौन-सा Starter उपयोग किया जाता है?
DC सीरीज मोटर के लिए सामान्यतः Two-Point Starter (दो-बिंदु स्टार्टर) का उपयोग किया जाता है। ऐसा इसलिए किया जाता है क्योंकि सीरीज मोटर में फील्ड वाइंडिंग और आर्मेचर वाइंडिंग श्रृंखला में जुड़ी होती हैं, और फील्ड करंट आर्मेचर करंट के बराबर होता है। Two-Point Starter स्टार्टिंग के समय आर्मेचर करंट को सुरक्षित सीमा में नियंत्रित करता है और मोटर को अत्यधिक इनरश करंट से बचाता है, जिससे कम्यूटेटर, वाइंडिंग और सप्लाई सिस्टम की सुरक्षा सुनिश्चित होती है।
धन्यवाद! हमें उम्मीद है कि यह पोस्ट ”Series DC Motor in Hindi” आपके लिए जानकारीपूर्ण और मददगार रही होगी। अगर आपके कोई विचार, अनुभव या सवाल हैं, तो उन्हें नीचे कमेंट में शेयर करना न भूलें.
