
इलेक्ट्रिकल इंजीनियरिंग की दुनिया में यदि किसी मोटर को स्थिर गति (Constant Speed Performance) और विश्वसनीय संचालन के लिए जाना जाता है, तो वह है DC Shunt Motor। औद्योगिक मशीनों से लेकर प्रयोगशाला उपकरणों तक, जहाँ भी नियंत्रित और लगभग समान गति की आवश्यकता होती है, वहाँ DC शंट मोटर एक प्रभावी समाधान के रूप में उपयोग की जाती है।
इस मोटर की विशेषता यह है कि इसकी फील्ड वाइंडिंग आर्मेचर के साथ समानांतर (Parallel) जुड़ी होती है, जिसके कारण चुंबकीय फ्लक्स लगभग स्थिर रहता है और स्पीड में बहुत कम उतार-चढ़ाव होता है। यही कारण है कि इसे मशीन टूल्स, कन्वेयर सिस्टम, पंप, प्रिंटिंग मशीन और टेक्सटाइल उद्योग में व्यापक रूप से प्रयोग किया जाता है।
इस लेख में हम DC Shunt Motor को गहराई से समझेंगे — इसकी परिभाषा, डायग्राम, कार्य सिद्धांत, स्पीड कंट्रोल की विधियाँ, विशेषताएँ (Characteristics), स्पीड-टॉर्क कर्व, ब्रेक टेस्ट, अनुप्रयोग, लाभ और सीमाएँ। यदि आप विद्यार्थी, प्रतियोगी परीक्षा की तैयारी कर रहे अभ्यर्थी या इलेक्ट्रिकल फील्ड के प्रोफेशनल हैं, तो यह लेख आपको इस विषय की संपूर्ण और व्यवस्थित जानकारी प्रदान करेगा।
Table of Contents
डीसी शंट मोटर क्या है? What is DC Shunt Motor
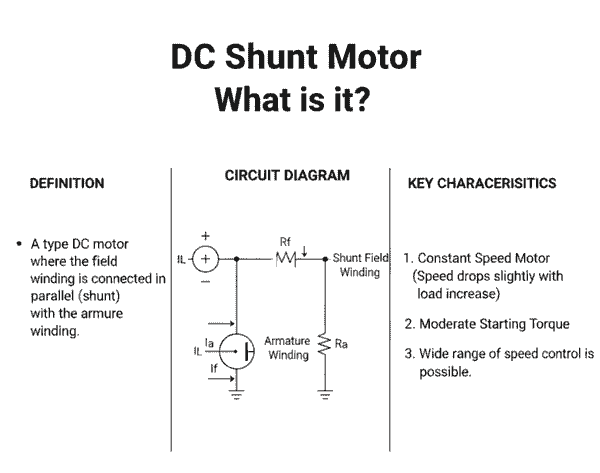
डीसी शंट मोटर (DC Shunt Motor) एक स्व-उत्तेजित डायरेक्ट करंट मोटर है जिसमें फील्ड वाइंडिंग को आर्मेचर वाइंडिंग के समानांतर (Parallel/Shunt) जोड़ा जाता है। इस समानांतर संयोजन के कारण दोनों वाइंडिंग को समान सप्लाई वोल्टेज प्राप्त होता है, जबकि फील्ड करंट और आर्मेचर करंट अलग-अलग शाखाओं में स्वतंत्र रूप से प्रवाहित होते हैं।
इस मोटर में फील्ड वाइंडिंग का प्रतिरोध अधिक होता है, इसलिए फील्ड करंट कम और लगभग स्थिर रहता है। चूंकि चुंबकीय फ्लक्स (Flux) फील्ड करंट पर निर्भर करता है, इसलिए फ्लक्स भी लगभग स्थिर बना रहता है। परिणामस्वरूप, लोड में परिवर्तन होने पर भी मोटर की गति (Speed) लगभग स्थिर रहती है।
डीसी शंट मोटर वह डीसी मोटर है जिसकी फील्ड वाइंडिंग आर्मेचर के समानांतर जुड़ी होती है और जो लोड परिवर्तन के बावजूद लगभग स्थिर गति बनाए रखती है।
डीसी शंट मोटर डायग्राम (DC Shunt Motor Diagram)
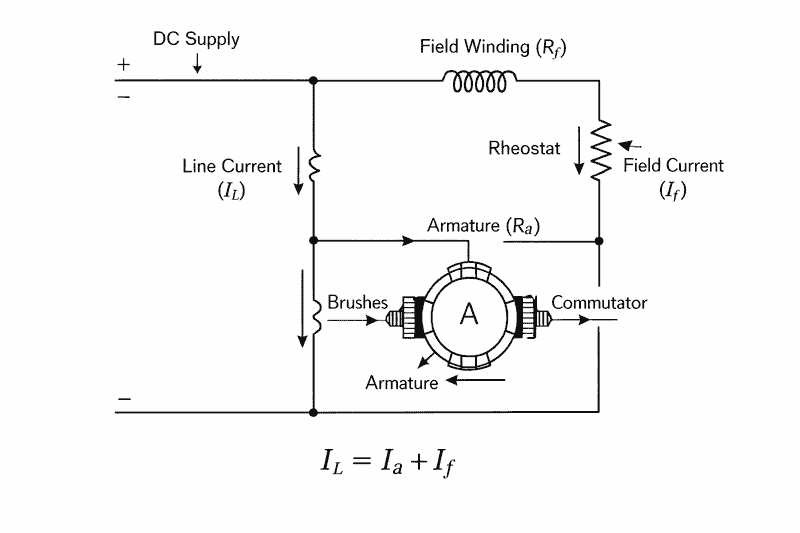
दिए गए डायग्राम में DC शंट मोटर का सर्किट स्पष्ट रूप से दर्शाया गया है, जिसमें प्रत्यक्ष धारा (DC) से दो समानांतर शाखाएँ निकलती हैं। एक शाखा फील्ड वाइंडिंग (Rf) की ओर जाती है और दूसरी आर्मेचर (Ra) की ओर। फील्ड वाइंडिंग सप्लाई के समानांतर जुड़ी होती है, इसलिए इसे पूरा सप्लाई वोल्टेज प्राप्त होता है।
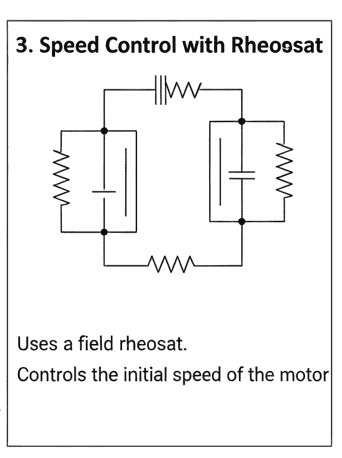
फील्ड सर्किट में एक रियोस्टेट लगाया गया है, जिसके द्वारा फील्ड करंट (If) को नियंत्रित किया जाता है। फील्ड करंट में परिवर्तन करने से चुंबकीय फ्लक्स बदलता है और उसी के अनुसार मोटर की गति नियंत्रित होती है। दूसरी ओर, आर्मेचर भी सीधे सप्लाई से जुड़ा होता है और उसमें आर्मेचर करंट (Ia) प्रवाहित होता है, जो चुंबकीय क्षेत्र के साथ क्रिया करके टॉर्क उत्पन्न करता है।
ब्रश और कम्यूटेटर आर्मेचर को धारा प्रदान करते हैं तथा करंट की दिशा को उचित बनाए रखते हैं जिससे मोटर निरंतर घूमती रहती है। चूँकि फील्ड वाइंडिंग और आर्मेचर समानांतर जुड़े होते हैं, इसलिए लाइन करंट (IL) दोनों धाराओं का योग होता है, अर्थात् IL = Ia + If। यही समानांतर संयोजन DC शंट मोटर की मुख्य पहचान है और इसी कारण इसकी गति लोड परिवर्तन के बावजूद लगभग स्थिर बनी रहती है।
और पढ़ें: ब्रशलेस डी सी मोटर क्या है? उपयोग और महत्व
डीसी शंट मोटर की संरचना (Construction of DC Shunt Motor)
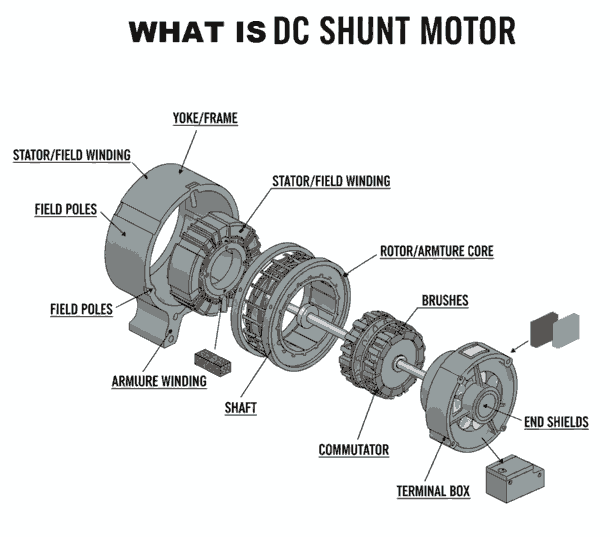
DC शंट मोटर का निर्माण संरचनात्मक रूप से व्यवस्थित और संतुलित होता है, जो यांत्रिक (Mechanical) तथा विद्युत (Electrical) दोनों दृष्टियों से उच्च कार्यकुशलता प्रदान करता है। इस मोटर की विशेषता इसकी समानांतर फील्ड वाइंडिंग है, जो इसे उत्कृष्ट स्पीड रेगुलेशन और स्थिर गति (Constant Speed Operation) प्रदान करती है। इसे विशेष रूप से उन अनुप्रयोगों के लिए डिज़ाइन किया गया है जहाँ लोड परिवर्तन के बावजूद गति लगभग स्थिर बनाए रखना आवश्यक होता है।
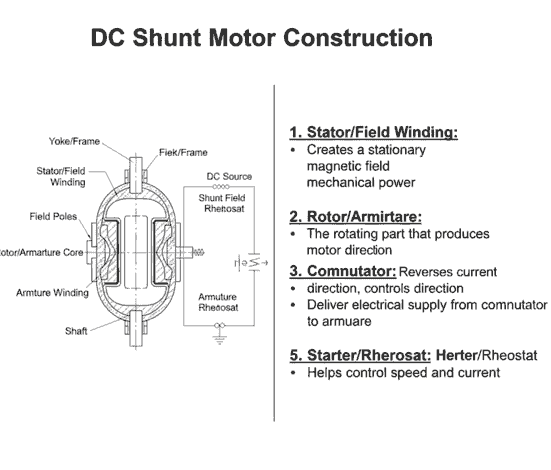
1. योक या फ्रेम (Yoke / Frame)
योक डीसी शंट मोटर का बाहरी आवरण होता है, जो सामान्यतः कास्ट आयरन (छोटी मोटरों में) या कास्ट स्टील / रोल्ड स्टील (बड़ी मोटरों में) से बनाया जाता है। इसका मुख्य कार्य मोटर के सभी आंतरिक भागों को यांत्रिक सुरक्षा प्रदान करना तथा उन्हें मजबूती से सहारा देना है। इसके अतिरिक्त, यह चुंबकीय परिपथ (Magnetic Circuit) का महत्वपूर्ण हिस्सा होता है क्योंकि फील्ड वाइंडिंग द्वारा उत्पन्न चुंबकीय फ्लक्स इसी के माध्यम से प्रवाहित होता है। इसलिए इसे कम चुंबकीय प्रतिरोध (Low Reluctance Path) प्रदान करने योग्य सामग्री से बनाया जाता है।
2. पोल कोर और पोल शू (Pole Core & Pole Shoe)
पोल कोर और पोल शू, योक से जुड़े होते हैं और अंदर की ओर निकले रहते हैं। पोल कोर फील्ड वाइंडिंग को सहारा देता है, जबकि पोल शू चुंबकीय फ्लक्स को आर्मेचर की सतह पर समान रूप से वितरित करता है। फ्लक्स का समान वितरण मोटर के सुचारु संचालन और एकसमान टॉर्क उत्पादन के लिए आवश्यक है। ये प्रायः लैमिनेटेड सिलिकॉन स्टील से बनाए जाते हैं ताकि एडी करंट लॉस कम किया जा सके और दक्षता बढ़ाई जा सके।
3. शंट फील्ड वाइंडिंग (Shunt Field Winding)
डीसी शंट मोटर में फील्ड वाइंडिंग पतले तांबे के तार के अधिक टर्न से बनाई जाती है। इसे आर्मेचर के समानांतर जोड़ा जाता है, जिससे इसे पूर्ण सप्लाई वोल्टेज प्राप्त होता है। इसका प्रतिरोध अधिक होता है, परिणामस्वरूप फील्ड करंट (If) कम रहता है। यह वाइंडिंग एक स्थिर और नियंत्रित चुंबकीय क्षेत्र उत्पन्न करती है, जो मोटर की लगभग स्थिर गति (Constant Speed Characteristic) का मुख्य कारण है। फील्ड सर्किट में रियोस्टेट लगाकर गति नियंत्रण भी किया जा सकता है।
4. आर्मेचर कोर (Armature Core)
आर्मेचर कोर मोटर का घूमने वाला भाग (Rotating Part) है, जो शाफ्ट पर लगा होता है। यह नरम स्टील की पतली लैमिनेटेड शीट्स से बना होता है, जिन्हें एक-दूसरे से इंसुलेट किया जाता है। लैमिनेशन का उद्देश्य एडी करंट लॉस को कम करना और दक्षता बढ़ाना है। आर्मेचर की बाहरी सतह पर खांचे (Slots) बने होते हैं, जिनमें आर्मेचर वाइंडिंग स्थापित की जाती है। यह भाग चुंबकीय फ्लक्स को काटकर विद्युत-यांत्रिक ऊर्जा रूपांतरण में महत्वपूर्ण भूमिका निभाता है।
5. आर्मेचर वाइंडिंग (Armature Winding)
आर्मेचर वाइंडिंग मोटे तांबे के तार से बनाई जाती है क्योंकि इसमें अधिक करंट (Ia) प्रवाहित होता है। इसे आर्मेचर कोर के खांचों में स्थापित किया जाता है और विशेष क्रम में जोड़ा जाता है। यह वाइंडिंग दो प्रकार की हो सकती है — लैप वाइंडिंग (Lap Winding) या वेव वाइंडिंग (Wave Winding), जो मोटर की रेटिंग और उपयोग के अनुसार चुनी जाती है। मोटर में यांत्रिक शक्ति (Mechanical Power) का वास्तविक उत्पादन आर्मेचर वाइंडिंग में ही होता है, जब यह चुंबकीय क्षेत्र के साथ परस्पर क्रिया करती है।
6. कम्यूटेटर (Commutator)
कम्यूटेटर तांबे के वेज-आकार (Wedge-shaped) खंडों से बना होता है, जिन्हें आपस में अभ्रक (Mica) द्वारा इंसुलेट किया जाता है। यह आर्मेचर वाइंडिंग से जुड़ा रहता है और धारा की दिशा को उपयुक्त समय पर बदलता है। इस प्रक्रिया को कम्यूटेशन (Commutation) कहा जाता है। कम्यूटेटर का मुख्य कार्य आर्मेचर में प्रवाहित प्रत्यावर्ती धारा को बाहरी परिपथ में एकदिशीय (DC) बनाए रखना है, जिससे मोटर का घूर्णन एकसमान बना रहे।
7. कार्बन ब्रश (Carbon Brushes)
कार्बन ब्रश कम्यूटेटर की सतह पर हल्के दबाव के साथ संपर्क बनाए रखते हैं। ये बाहरी DC सप्लाई से आर्मेचर वाइंडिंग तक करंट पहुँचाने का कार्य करते हैं। ब्रश होल्डर और स्प्रिंग की सहायता से उचित दबाव बनाए रखा जाता है ताकि स्पार्किंग कम हो और संपर्क सुचारु रहे। कार्बन का उपयोग इसलिए किया जाता है क्योंकि यह अच्छा चालक होने के साथ-साथ कम घर्षण उत्पन्न करता है।
8. स्टार्टर (3-Point Starter)
डीसी शंट मोटर को सीधे सप्लाई से जोड़ने पर प्रारंभ में अत्यधिक आर्मेचर करंट प्रवाहित हो सकता है, जो मोटर को नुकसान पहुँचा सकता है। इसलिए इसे प्रारंभ करने के लिए 3-पॉइंट स्टार्टर का उपयोग किया जाता है। यह प्रारंभिक उच्च करंट को नियंत्रित करता है तथा मोटर को धीरे-धीरे सुरक्षित रूप से गति प्रदान करता है। साथ ही यह ओवरलोड और फील्ड फेल्योर जैसी स्थितियों से सुरक्षा भी प्रदान करता है।
DC शंट मोटर में फील्ड वाइंडिंग पतले तार और अधिक टर्न वाली होती है, जबकि आर्मेचर वाइंडिंग मोटे कंडक्टर से बनी होती है। यह संरचना मोटर को स्थिर चुंबकीय क्षेत्र और संतुलित संचालन प्रदान करती है।
और पढ़ें: डीसी मोटर क्या है? उपयोग और महत्व
डीसी शंट मोटर का कार्य सिद्धांत (Working Principle of DC Shunt Motor)
डीसी शंट मोटर का कार्य सिद्धांत विद्युत-चुंबकीय बल (Electromagnetic Force) और फ्लेमिंग के बाएं हाथ के नियम पर आधारित है। इसमें फील्ड वाइंडिंग और आर्मेचर वाइंडिंग समानांतर (Shunt) में जुड़ी होती हैं, इसलिए दोनों को एक ही सप्लाई वोल्टेज प्राप्त होता है।
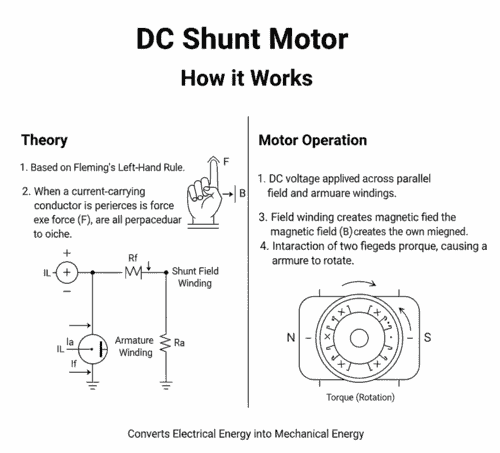
जब मोटर को DC सप्लाई दी जाती है, तो सबसे पहले फील्ड वाइंडिंग में धारा प्रवाहित होती है। इस धारा के कारण स्टेटर पोल्स में एक स्थिर चुंबकीय क्षेत्र (Magnetic Field) बनता है। उसी समय आर्मेचर वाइंडिंग में भी धारा प्रवाहित होती है, जो इस चुंबकीय क्षेत्र के भीतर स्थित होती है।
फील्ड करंट का समीकरण: If = V / Rf
अब जब किसी चालक (Conductor) में धारा प्रवाहित हो और वह चुंबकीय क्षेत्र में रखा जाए, तो उस पर एक बल कार्य करता है। यही बल लॉरेंट्ज़ फोर्स (Lorentz Force) कहलाता है। आर्मेचर के चालकों पर यह बल विपरीत दिशाओं में लगता है, जिससे एक घूर्णन बल या टॉर्क (Torque) उत्पन्न होता है और रोटर घूमने लगता है।
आर्मेचर और फील्ड के बीच वायु-अंतराल (Air Gap) में मौजूद दोनों चुंबकीय क्षेत्रों की परस्पर क्रिया ही मोटर को घुमाने का वास्तविक कारण होती है।
घूमते समय कम्यूटेटर अत्यंत महत्वपूर्ण भूमिका निभाता है। यह नियमित अंतराल पर आर्मेचर धारा की दिशा बदलता रहता है। यदि धारा की दिशा न बदली जाए तो टॉर्क की दिशा बदल जाएगी और मोटर रुक सकती है। कम्यूटेटर धारा को इस प्रकार उलटता है कि टॉर्क हमेशा एक ही दिशा में बना रहे, परिणामस्वरूप मोटर लगातार और समान दिशा में घूमती रहती है।
चूंकि शंट मोटर में फील्ड करंट लगभग स्थिर रहता है, इसलिए चुंबकीय फ्लक्स भी लगभग स्थिर रहता है। इसी कारण यह मोटर सामान्य लोड परिवर्तन के बावजूद लगभग स्थिर गति से कार्य करती है।
और पढ़ें: स्टार–डेल्टा स्टार्टर कैसे काम करता है
डीसी शंट मोटर में बैक ईएमएफ (Back EMF in DC Shunt Motor)
डीसी शंट मोटर में बैक ईएमएफ (Eb) वह प्रेरित वोल्टेज है जो आर्मेचर के घूमने पर उत्पन्न होता है। जब आर्मेचर वाइंडिंग, फील्ड वाइंडिंग द्वारा निर्मित चुंबकीय क्षेत्र (Magnetic Field) के भीतर घूमती है, तब उसके चालक चुंबकीय फ्लक्स (Φ) को काटते हैं। फैराडे के विद्युत-चुंबकीय प्रेरण के नियम के अनुसार इस प्रक्रिया से आर्मेचर में एक प्रेरित ईएमएफ उत्पन्न होता है। लेन्ज़ के नियम के अनुसार यह प्रेरित ईएमएफ हमेशा उस कारण का विरोध करता है जिसने उसे उत्पन्न किया है, अर्थात यह सप्लाई वोल्टेज की विपरीत दिशा में कार्य करता है। इसी कारण इसे बैक ईएमएफ या काउंटर ईएमएफ कहा जाता है।
बैक ईएमएफ का मूल समीकरण
Eb = (PΦZN) / (60A)
- जहाँ — P = ध्रुवों (Poles) की संख्या
- Φ = प्रति ध्रुव फ्लक्स (Weber में)
- Z = आर्मेचर चालकों की कुल संख्या
- N = गति (RPM में)
- A = समानांतर पथों की संख्या
इस समीकरण से स्पष्ट है: Eb ∝ ΦN
अर्थात बैक ईएमएफ, फ्लक्स और गति दोनों के सीधे समानुपाती है।
वोल्टेज समीकरण (Voltage Equation)
डीसी शंट मोटर के लिए वोल्टेज समीकरण है: V = Eb + IaRa या Eb = V − IaRa
जहाँ —
- V = टर्मिनल वोल्टेज
- Ia = आर्मेचर करंट
- Ra = आर्मेचर प्रतिरोध
यह समीकरण दर्शाता है कि सप्लाई वोल्टेज का एक भाग बैक ईएमएफ को संतुलित करता है तथा शेष भाग आर्मेचर प्रतिरोध में वोल्टेज ड्रॉप के रूप में व्यय होता है।
गति के साथ संबंध
चूंकि डीसी शंट मोटर में फील्ड फ्लक्स (Φ) लगभग स्थिर रहता है, इसलिए:
Eb ∝ N
अर्थात बैक ईएमएफ सीधे मोटर की गति पर निर्भर करता है। यदि गति बढ़ेगी तो Eb बढ़ेगा, और यदि गति घटेगी तो Eb कम होगा।
डीसी शंट मोटर में बैक ईएमएफ का महत्व
1. स्व-विनियमन (Self Regulation): जब मोटर पर लोड बढ़ता है, तो गति थोड़ी कम होती है। इससे Eb घटता है, परिणामस्वरूप Ia बढ़ता है और अधिक टॉर्क उत्पन्न होता है (क्योंकि T ∝ ΦIa)। इस प्रकार मोटर स्वयं संतुलन स्थापित कर लेती है।
2. स्टार्टिंग अवस्था: स्टार्टिंग के समय N = 0, इसलिए Eb = 0। इस स्थिति में Ia = V / Ra हो सकता है, जो अत्यधिक बड़ा होता है। इसलिए प्रारंभिक उच्च करंट को नियंत्रित करने के लिए स्टार्टर का उपयोग आवश्यक होता है।
3. ऊर्जा रूपांतरण: मोटर में विकसित यांत्रिक शक्ति का समीकरण है:
Pmechanical = Eb × Ia
अर्थात बैक ईएमएफ और आर्मेचर करंट का गुणनफल ही मोटर द्वारा विकसित विद्युत-से-यांत्रिक शक्ति रूपांतरण को दर्शाता है।
और पढ़ें: Snubber Circuit Values कैसे Calculate करें?
डीसी शंट मोटर में स्पीड नियंत्रण (Speed Control Of DC Shunt Motor)
DC शंट मोटर को सामान्यतः स्थिर गति वाली मशीन माना जाता है, क्योंकि इसका फ्लक्स (Φ) लगभग स्थिर रहता है। फिर भी इसकी गति को नियंत्रित करना व्यावहारिक रूप से सरल है। गति का मूल संबंध है:
N ∝ (V − IaRa) / Φ
अर्थात गति को नियंत्रित करने के लिए हम तीन प्रमुख मात्राओं को प्रभावित कर सकते हैं — फ्लक्स (Φ), आर्मेचर वोल्टेज ड्रॉप, या सप्लाई वोल्टेज (V)। इन्हीं के आधार पर स्पीड नियंत्रण की निम्न मुख्य विधियाँ प्रयोग की जाती हैं।
1. फील्ड फ्लक्स नियंत्रण विधि (Field Control / Field Weakening Method)
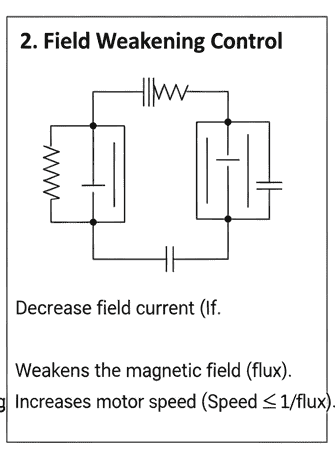
डीसी शंट मोटर में स्पीड को नियंत्रित करने की एक प्रभावी विधि फील्ड फ्लक्स नियंत्रण (Field Weakening Method) है। इस विधि में फील्ड सर्किट में एक रियोस्टेट जोड़कर फील्ड करंट (If) को नियंत्रित किया जाता है। चूँकि फ्लक्स और फील्ड करंट के बीच सीधा संबंध होता है, इसलिए:
Φ ∝ If
जब If को कम किया जाता है, तो चुंबकीय फ्लक्स (Φ) घटता है। मोटर की गति का संबंध फ्लक्स से इस प्रकार है:
N ∝ 1/Φ
अर्थात फ्लक्स कम करने पर गति (Speed) बढ़ जाती है। इसी कारण यह विधि रेटेड स्पीड से अधिक गति प्राप्त करने के लिए उपयोग की जाती है। इस विधि का एक बड़ा लाभ यह है कि फील्ड सर्किट में धारा कम होने के कारण पावर लॉस भी बहुत कम होता है। नियंत्रण सरल, सस्ता और व्यावहारिक होता है, इसलिए यह औद्योगिक अनुप्रयोगों में व्यापक रूप से उपयोग की जाती है।
टॉर्क का संबंध इस प्रकार है: T ∝ ΦIa
इसलिए फ्लक्स कम करने पर टॉर्क भी कम हो जाता है। यदि फ्लक्स को अत्यधिक कम कर दिया जाए तो कम्यूटेशन में समस्या और स्पार्किंग हो सकती है।
इसलिए यह विधि उन अनुप्रयोगों के लिए उपयुक्त है जहाँ हल्के लोड पर उच्च गति की आवश्यकता होती है, जबकि भारी लोड स्थितियों में इसका उपयोग सावधानी से किया जाता है।
2. आर्मेचर प्रतिरोध नियंत्रण विधि (Armature Resistance Control Method)
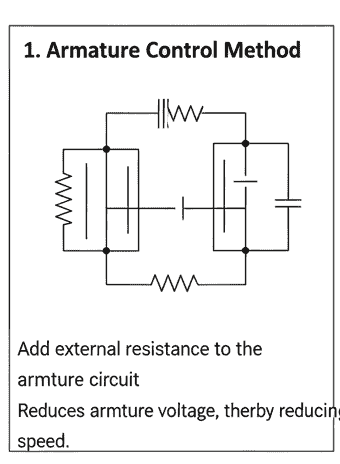
डीसी शंट मोटर में गति को रेटेड स्पीड से कम करने के लिए आर्मेचर प्रतिरोध नियंत्रण विधि का उपयोग किया जाता है। इस तकनीक में आर्मेचर सर्किट के साथ सीरीज में एक अतिरिक्त प्रतिरोध 𝑅𝑒𝑥𝑡 जोड़ा जाता है। जब यह अतिरिक्त प्रतिरोध जोड़ा जाता है, तो कुल आर्मेचर प्रतिरोध बढ़ जाता है और वोल्टेज ड्रॉप भी बढ़ता है। मोटर का वोल्टेज समीकरण इस प्रकार है:
Eb = V − Ia (Ra + Rext)
अतिरिक्त प्रतिरोध के कारण आर्मेचर में उपलब्ध प्रभावी वोल्टेज कम हो जाता है, जिससे बैक ईएमएफ 𝐸𝑏 घटता है। चूँकि मोटर की गति का संबंध इस प्रकार है:
N ∝ Eb / Φ
और शंट मोटर में फ्लक्स Φ लगभग स्थिर रहता है, इसलिए Eb कम होने पर गति N भी कम हो जाती है। इसी कारण यह विधि रेटेड स्पीड से नीचे की गति प्राप्त करने के लिए उपयुक्त मानी जाती है।
इस विधि का लाभ यह है कि इसका नियंत्रण सरल और कार्यान्वयन आसान होता है। प्रारंभिक परीक्षण, प्रयोगात्मक सेटअप या हल्के लोड अनुप्रयोगों में यह व्यावहारिक समाधान प्रदान करती है।
हालाँकि, इसकी सीमाएँ महत्वपूर्ण हैं। अतिरिक्त प्रतिरोध के कारण Ia²R लॉस बढ़ जाता है, जिससे ऊर्जा की हानि अधिक होती है और मोटर की दक्षता कम हो जाती है। साथ ही, लोड परिवर्तन होने पर स्पीड रेगुलेशन कमजोर हो जाता है, क्योंकि आर्मेचर करंट में बदलाव सीधे वोल्टेज ड्रॉप को प्रभावित करता है।
3. आर्मेचर वोल्टेज नियंत्रण (Armature Voltage Control / Ward Leonard Method)
डीसी शंट मोटर में सबसे सटीक और प्रभावी स्पीड नियंत्रण विधियों में से एक है आर्मेचर वोल्टेज नियंत्रण। इस विधि में आर्मेचर को परिवर्तनीय DC वोल्टेज प्रदान किया जाता है, जबकि फील्ड फ्लक्स को सामान्यतः स्थिर रखा जाता है। मोटर की गति का मूल संबंध है:
N ∝ V
अर्थात् यदि फ्लक्स Φ स्थिर है, तो गति सीधे आर्मेचर वोल्टेज पर निर्भर करती है। इसलिए सप्लाई वोल्टेज को नियंत्रित करके अत्यंत स्मूथ, स्थिर और सटीक गति नियंत्रण प्राप्त किया जा सकता है। यही सिद्धांत पारंपरिक Ward Leonard प्रणाली का आधार है, जिसमें एक अलग DC जनरेटर द्वारा मोटर को परिवर्तनीय वोल्टेज प्रदान किया जाता था।
इस विधि की सबसे बड़ी विशेषता इसकी व्यापक स्पीड रेंज है। शून्य के निकट गति से लेकर रेटेड स्पीड तक नियंत्रण संभव है, और स्पीड रेगुलेशन अत्यंत उत्कृष्ट रहता है। चूँकि आर्मेचर सर्किट में अनावश्यक प्रतिरोध नहीं जोड़ा जाता, इसलिए दक्षता भी उच्च बनी रहती है। साथ ही, टॉर्क नियंत्रण बेहतर होता है क्योंकि टॉर्क का संबंध T∝ΦIa से है और आर्मेचर करंट को सटीक रूप से नियंत्रित किया जा सकता है।
आधुनिक समय में पारंपरिक Ward Leonard सेटअप (जिसमें मोटर-जनरेटर संयोजन होता था) की जगह थाइरिस्टर कंट्रोल, DC ड्राइव और पावर इलेक्ट्रॉनिक्स आधारित सिस्टम ने ले ली है। ये प्रणालियाँ अधिक कॉम्पैक्ट, ऊर्जा-दक्ष, कम रखरखाव वाली और डिजिटल नियंत्रण से युक्त होती हैं, जिससे प्रदर्शन और विश्वसनीयता दोनों बढ़ जाते हैं।
डीसी शंट मोटर पर ब्रेक टेस्ट (Brake Test on DC Shunt Motor)
ब्रेक टेस्ट डीसी शंट मोटर पर किया जाने वाला एक प्रत्यक्ष लोड परीक्षण (Direct Load Test) है, जिसका उपयोग मुख्य रूप से मोटर की दक्षता (Efficiency), टॉर्क (Torque) और स्पीड-लोड विशेषताओं का निर्धारण करने के लिए किया जाता है। यह परीक्षण सामान्यतः कम रेटिंग वाली डीसी मोटरों पर किया जाता है, क्योंकि उच्च रेटिंग मशीनों में ऊर्जा की हानि और ऊष्मा अधिक हो सकती है। इस टेस्ट में मोटर के शाफ्ट पर लगे ब्रेक ड्रम या पुली पर बेल्ट की सहायता से यांत्रिक लोड लगाया जाता है और विभिन्न लोड स्थितियों पर इनपुट तथा आउटपुट शक्ति मापी जाती है।
आवश्यक उपकरण
इस परीक्षण के लिए डीसी शंट मोटर, ब्रेक ड्रम (अक्सर वाटर-कूल्ड), ब्रेक बेल्ट, दो स्प्रिंग बैलेंस (S1 और S2 रीडिंग के लिए), टेकोमीटर (गति मापने हेतु), वोल्टमीटर और एमीटर की आवश्यकता होती है।
परीक्षण प्रक्रिया
सबसे पहले मोटर को 3-पॉइंट स्टार्टर की सहायता से रेटेड वोल्टेज पर चालू किया जाता है। प्रारंभ में नो-लोड स्थिति में स्पीड, वोल्टेज और करंट नोट किए जाते हैं। इसके बाद ब्रेक बेल्ट को धीरे-धीरे कसकर लोड बढ़ाया जाता है। प्रत्येक लोड पर स्प्रिंग बैलेंस की रीडिंग (S1 और S2), मोटर की गति (N RPM में), सप्लाई वोल्टेज (V) और इनपुट करंट (I) दर्ज किए जाते हैं। परीक्षण पूर्ण होने पर लोड हटाकर मोटर को बंद कर दिया जाता है।
शक्ति और दक्षता की गणना
आउटपुट पावर (Output Power): ब्रेक ड्रम का त्रिज्या R (मीटर में) और स्पीड N (RPM में) होने पर,
Output = 2πRN (S1 − S2) (वाट में)
जहाँ (S1 − S2) नेट लोड बल को दर्शाता है।
इनपुट पावर (Input Power):
Input = V × I
जहाँ V = टर्मिनल वोल्टेज और I = लाइन करंट।
दक्षता (Efficiency):
Efficiency = (Output / Input) × 100
ब्रेक टेस्ट का महत्व
ब्रेक टेस्ट से मोटर का वास्तविक प्रदर्शन ज्ञात होता है, क्योंकि इसमें मोटर को वास्तविक लोड पर चलाकर मापन किया जाता है। इससे स्पीड-लोड कर्व, टॉर्क विशेषताएँ और कुल दक्षता का व्यावहारिक मूल्य प्राप्त होता है। हालाँकि, ऊर्जा हानि अधिक होने और ऊष्मा उत्पादन के कारण यह परीक्षण प्रायः केवल छोटी रेटिंग की डीसी शंट मोटरों पर ही किया जाता है।
और पढ़ें: ट्रांजिस्टर क्या होता है?
डीसी शंट मोटर की विशेषताएँ (Characteristics of DC Shunt Motor)
डीसी शंट मोटर अपनी लगभग स्थिर गति (Nearly Constant Speed) के लिए जानी जाती है। इसका मुख्य कारण यह है कि इसमें फील्ड फ्लक्स (Φ) लगभग स्थिर रहता है, जिससे इसकी कार्य-विशेषताएँ सरल, स्थिर और पूर्वानुमेय होती हैं। इसकी प्रदर्शन विशेषताओं को तीन मुख्य ग्राफ़ के माध्यम से समझा जाता है, जो टॉर्क, आर्मेचर करंट और गति के बीच संबंध को दर्शाते हैं।
1. टॉर्क बनाम आर्मेचर करंट (Torque vs Armature Current)
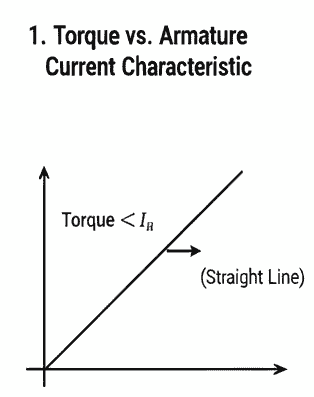
DC शंट मोटर में टॉर्क का संबंध मुख्य रूप से आर्मेचर करंट से होता है। चूँकि फ्लक्स (Φ) लगभग स्थिर रहता है, इसलिए टॉर्क का संबंध इस प्रकार व्यक्त किया जाता है: T ∝ Ia। इसका अर्थ है कि टॉर्क सीधे आर्मेचर करंट के समानुपाती होता है। इस विशेषता के कारण जब आर्मेचर करंट बढ़ता है तो टॉर्क भी रैखिक (Linear) रूप से बढ़ता है। इसका ग्राफ एक सीधी रेखा के रूप में प्राप्त होता है। शंट मोटर का स्टार्टिंग टॉर्क मध्यम होता है, इसलिए यह भारी झटकों या अत्यधिक प्रारंभिक टॉर्क वाले लोड के लिए उपयुक्त नहीं है, बल्कि नियंत्रित और संतुलित टॉर्क की आवश्यकता वाले अनुप्रयोगों के लिए अधिक उपयुक्त है।
2. गति बनाम आर्मेचर करंट (Speed vs Armature Current)
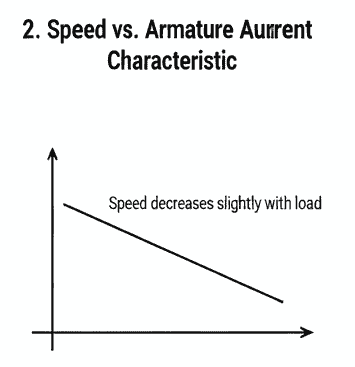
शंट मोटर की गति का संबंध समीकरण N ∝ (V − IaRa) / Φ से व्यक्त किया जाता है। चूँकि Φ लगभग स्थिर रहता है और IaRa का मान सामान्यतः कम होता है, इसलिए लोड बढ़ने पर भी गति में बहुत हल्का परिवर्तन होता है। इस कारण इसका ग्राफ लगभग क्षैतिज रेखा (Nearly Horizontal Line) के रूप में प्राप्त होता है। जब लोड बढ़ता है तो आर्मेचर करंट बढ़ता है, परंतु गति में केवल थोड़ी कमी आती है। इसी उत्कृष्ट स्पीड रेगुलेशन के कारण DC शंट मोटर को Constant Speed Motor कहा जाता है। यह विशेषता इसे उन मशीनों के लिए उपयुक्त बनाती है जहाँ गति का स्थिर रहना अत्यंत आवश्यक है।
3. गति बनाम टॉर्क (Speed vs Torque)
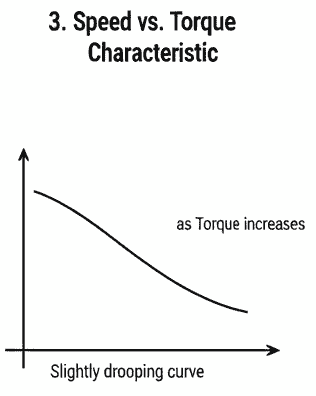
चूँकि टॉर्क आर्मेचर करंट के समानुपाती होता है और लोड बढ़ने पर आर्मेचर करंट बढ़ता है, इसलिए गति में हल्की गिरावट आती है। इसका ग्राफ हल्की ढलान वाली रेखा (Slightly Drooping Curve) को दर्शाता है, जिसमें टॉर्क बढ़ने पर गति थोड़ा कम होती है, परंतु परिवर्तन बहुत अधिक नहीं होता। यह दर्शाता है कि शंट मोटर स्थिर गति और नियंत्रित टॉर्क प्रदान करती है। इसी कारण यह लेथ मशीन, ड्रिल मशीन, कन्वेयर, प्रिंटिंग प्रेस और पंखों जैसे औद्योगिक उपकरणों के लिए अत्यंत उपयुक्त मानी जाती है।
और पढ़ें: ऑप्टोकपलर क्या है?
डीसी शंट मोटर के अनुप्रयोग (Applications of DC Shunt Motor)
डीसी शंट मोटर का उपयोग मुख्य रूप से उन स्थानों पर किया जाता है जहाँ लगभग स्थिर गति (Nearly Constant Speed) की आवश्यकता होती है। इसकी प्रमुख विशेषता उत्कृष्ट स्पीड रेगुलेशन है, क्योंकि इसमें फील्ड फ्लक्स (Φ) लगभग स्थिर रहता है। परिणामस्वरूप यह नो-लोड से फुल-लोड तक गति में बहुत कम परिवर्तन करती है। यद्यपि इसका स्टार्टिंग टॉर्क मध्यम (Moderate Starting Torque) होता है, फिर भी यह उन अनुप्रयोगों के लिए अत्यंत उपयुक्त है जहाँ नियंत्रित टॉर्क और समान गति आवश्यक हो तथा प्रारंभिक झटकेदार लोड न हों।
औद्योगिक मशीनों में उपयोग
डीसी शंट मोटर का व्यापक उपयोग मशीन टूल्स और औद्योगिक मशीनों में किया जाता है, क्योंकि इन उपकरणों में सटीक एवं स्थिर गति अत्यंत महत्वपूर्ण होती है। लेथ मशीन में धातु या लकड़ी की कटाई के दौरान समान RPM बनाए रखना आवश्यक होता है, जिससे उत्पाद की गुणवत्ता प्रभावित न हो। मिलिंग मशीन, ड्रिलिंग मशीन, ग्राइंडर, शेपिंग मशीन तथा बोरिंग मिल जैसे उपकरणों में भी नियंत्रित गति की आवश्यकता होती है।
पंप और ब्लोअर में उपयोग
सेंट्रीफ्यूगल पंप, रोटरी पंप, ब्लोअर और पंखों जैसे उपकरणों में तरल या वायु प्रवाह की दर (Flow Rate) और दबाव को स्थिर बनाए रखना आवश्यक होता है। चूँकि इन उपकरणों का प्रदर्शन सीधे मोटर की गति पर निर्भर करता है, इसलिए लगभग स्थिर गति प्रदान करने वाली डीसी शंट मोटर इनके लिए उपयुक्त है।
कन्वेयर और मटेरियल हैंडलिंग
उद्योगों में कन्वेयर बेल्ट प्रणालियों का उपयोग सामग्री को एक स्थान से दूसरे स्थान तक समान गति से ले जाने के लिए किया जाता है। DC शंट मोटर इस कार्य के लिए आदर्श है क्योंकि यह लोड परिवर्तन के बावजूद गति में न्यूनतम परिवर्तन करती है। हल्के लोड वाली लिफ्ट और होइस्ट में भी इसका उपयोग किया जाता है.
प्रिंटिंग और टेक्सटाइल उद्योग
प्रिंटिंग प्रेस में कागज की फीडिंग समान गति से होनी चाहिए, अन्यथा प्रिंट की गुणवत्ता प्रभावित हो सकती है। इसी प्रकार टेक्सटाइल और स्पिनिंग मशीनों में धागे की समान गुणवत्ता बनाए रखने के लिए नियंत्रित गति आवश्यक है। पेपर निर्माण मशीनों में भी निरंतर और संतुलित संचालन की आवश्यकता होती है।
घरेलू एवं छोटे उपकरण
कुछ DC आधारित वॉशिंग मशीनों, ऑटोमैटिक विंडस्क्रीन वाइपर, वुडवर्किंग टूल्स और छोटे वर्कशॉप उपकरणों में भी DC शंट मोटर का उपयोग किया जाता है। इन उपकरणों में स्मूथ ऑपरेशन और नियंत्रित गति आवश्यक होती है, जिसे यह मोटर प्रभावी रूप से प्रदान करती है।
DC Shunt Motor बनाम DC Series Motor
DC मोटरों में DC Shunt Motor और DC Series Motor दो प्रमुख प्रकार हैं, जिनकी संरचना, कार्यप्रणाली और अनुप्रयोग एक-दूसरे से भिन्न होते हैं। Shunt मोटर को लगभग स्थिर गति (Constant Speed) के लिए जाना जाता है, जबकि Series मोटर उच्च प्रारंभिक टॉर्क (High Starting Torque) प्रदान करती है। नीचे दी गई सारणी में दोनों मोटरों के बीच मुख्य अंतर स्पष्ट रूप से दर्शाए गए हैं।
| विशेषता | DC Shunt Motor | DC Series Motor |
|---|---|---|
| कनेक्शन प्रकार | फील्ड वाइंडिंग आर्मेचर के समानांतर | फील्ड वाइंडिंग आर्मेचर के श्रेणीक्रम (Series) में |
| स्पीड | लगभग स्थिर | लोड के साथ बहुत बदलती |
| स्टार्टिंग टॉर्क | मध्यम | बहुत अधिक |
| स्पीड रेगुलेशन | उत्कृष्ट (Good Regulation) | कमजोर (Poor Regulation) |
| स्पीड कंट्रोल | आसान | अपेक्षाकृत कठिन |
| प्रमुख उपयोग | लेथ, ड्रिल, मिलिंग मशीन | क्रेन, लिफ्ट, ट्रैक्शन |
यह तुलना स्पष्ट करती है कि जहाँ स्थिर गति की आवश्यकता हो वहाँ DC Shunt Motor उपयुक्त होती है, जबकि भारी प्रारंभिक भार उठाने वाले अनुप्रयोगों में DC Series Motor बेहतर विकल्प साबित होती है।
DC Shunt Motor के लाभ (Advantages)
DC शंट मोटर अपनी लगभग स्थिर गति (Nearly Constant Speed) के कारण औद्योगिक उपयोग में अत्यंत लोकप्रिय है। इसका स्पीड रेगुलेशन उत्कृष्ट होता है, अर्थात लोड बदलने पर भी गति में बहुत कम परिवर्तन होता है। यही कारण है कि इसे मशीन टूल्स और सटीक संचालन वाली प्रणालियों में प्राथमिकता दी जाती है।
इसकी संरचना अपेक्षाकृत सरल होती है, जिससे इसे समझना, स्थापित करना और नियंत्रित करना आसान होता है। यह मोटर स्मूथ और स्थिर संचालन प्रदान करती है, जिसके कारण कंपन (Vibration) और झटके कम होते हैं।
साथ ही इसका टॉर्क नियंत्रित और रैखिक (Linear) प्रकृति का होता है, जिससे प्रदर्शन पूर्वानुमेय (Predictable) रहता है। इसका स्टार्टिंग टॉर्क मध्यम होता है, जो सामान्य औद्योगिक लोड के लिए पर्याप्त माना जाता है।
DC Shunt Motor के नुकसान (Disadvantages)
हालाँकि DC शंट मोटर कई मामलों में उपयोगी है, लेकिन इसके कुछ सीमित पक्ष भी हैं। इसमें ब्रश और कम्यूटेटर का उपयोग होता है, जिनका समय-समय पर रखरखाव आवश्यक होता है।
स्पार्किंग और घिसाव (Wear and Tear) के कारण रखरखाव लागत बढ़ सकती है। यह मोटर उच्च स्टार्टिंग टॉर्क की आवश्यकता वाले भारी लोड, जैसे क्रेन या इलेक्ट्रिक ट्रैक्शन, के लिए उपयुक्त नहीं है।
बड़ी और आधुनिक औद्योगिक प्रणालियों में इसका उपयोग सीमित होता जा रहा है, क्योंकि AC मोटर और विशेष रूप से BLDC मोटर अधिक दक्ष (Efficient), कम मेंटेनेंस वाली और ऊर्जा की दृष्टि से बेहतर विकल्प प्रदान करती हैं।
अक्सर पूछे जाने वाले सवाल (FAQ)
1. डीसी शंट मोटर को स्थिर गति (Constant Speed) मोटर क्यों कहा जाता है?
DC शंट मोटर को लगभग स्थिर गति (Nearly Constant Speed) वाली मोटर इसलिए कहा जाता है क्योंकि इसकी फील्ड वाइंडिंग सप्लाई के समानांतर जुड़ी होती है, जिससे फील्ड करंट (If) और चुंबकीय फ्लक्स (Φ) लगभग स्थिर रहते हैं। मोटर की गति का संबंध N ∝ (V − IaRa) / Φ से होता है। चूँकि शंट मोटर में Φ ≈ Constant रहता है और आर्मेचर वोल्टेज ड्रॉप IaRa सामान्यतः बहुत कम होता है, इसलिए लोड परिवर्तन का गति पर प्रभाव नगण्य होता है। जब लोड बढ़ता है तो गति थोड़ी कम होती है, जिससे बैक EMF घटता है क्योंकि Eb = V − IaRa, परिणामस्वरूप Ia बढ़ता है और टॉर्क बढ़ जाता है (T ∝ ΦIa), जिससे मोटर नया संतुलन प्राप्त कर लेती है। इसी स्व-नियमन (Self Regulation) गुण के कारण DC शंट मोटर की गति लगभग स्थिर बनी रहती है।
2. डीसी शंट मोटर को कैसे स्टार्ट किया जाता है?
डीसी शंट मोटर को सीधे सप्लाई से स्टार्ट नहीं किया जाता क्योंकि स्टार्टिंग के समय गति N=0 होती है, इसलिए बैक ईएमएफ Eb=0 हो जाता है। इस स्थिति में आर्मेचर करंट बहुत अधिक हो सकता है, जिसे सूत्र के रूप में लिख सकते हैं: Ia = V / Ra। चूँकि आर्मेचर प्रतिरोध Ra बहुत कम होता है, इसलिए करंट खतरनाक रूप से बढ़ सकता है और मोटर को क्षति पहुँचा सकता है।
इसी कारण मोटर को स्टार्ट करने के लिए 3-पॉइंट या 4-पॉइंट स्टार्टर का उपयोग किया जाता है। प्रारंभ में आर्मेचर सर्किट में बाहरी प्रतिरोध जोड़ा जाता है ताकि करंट नियंत्रित रहे। जैसे-जैसे मोटर की गति बढ़ती है, बैक ईएमएफ उत्पन्न होता है, जिसका समीकरण है: Eb = V − IaRa। बैक ईएमएफ बढ़ने पर आर्मेचर करंट स्वतः कम होने लगता है और धीरे-धीरे बाहरी प्रतिरोध हटा दिया जाता है। इस प्रकार मोटर सुरक्षित रूप से अपनी सामान्य गति पर पहुँच जाती है।
3. डीसी शंट मोटर स्पीड रेगुलेशन कैसे प्राप्त करती है?
डीसी शंट मोटर में स्पीड रेगुलेशन मुख्यतः बैक ईएमएफ (Back EMF) और लगभग स्थिर फ्लक्स के कारण प्राप्त होता है। शंट मोटर में फील्ड फ्लक्स ϕ लगभग स्थिर रहता है क्योंकि फील्ड वाइंडिंग सप्लाई के समानांतर जुड़ी होती है। मोटर की गति का संबंध समीकरण N ∝ (V − IaRa) / φ से व्यक्त किया जाता है। जब लोड बढ़ता है तो आर्मेचर करंट Ia बढ़ता है, जिससे वोल्टेज ड्रॉप IaRa बढ़ता है और बैक ईएमएफ कम होता है, जहाँ Eb = V − IaRa। बैक ईएमएफ घटने से गति में हल्की कमी आती है, लेकिन साथ ही टॉर्क बढ़ता है क्योंकि T ∝ φIa। यह अतिरिक्त टॉर्क लोड को संतुलित कर देता है और मोटर नई स्थिर गति पर कार्य करने लगती है। चूँकि फ्लक्स लगभग स्थिर रहता है और गति में परिवर्तन बहुत कम होता है, इसलिए डीसी शंट मोटर उत्कृष्ट स्पीड रेगुलेशन प्रदान करती है और इसे Nearly Constant Speed Motor कहा जाता है।
4. डीसी शंट मोटर के अनुप्रयोग क्या हैं?
डीसी शंट मोटर का उपयोग मुख्य रूप से उन स्थानों पर किया जाता है जहाँ लगभग स्थिर गति (Nearly Constant Speed) और अच्छा स्पीड रेगुलेशन आवश्यक होता है। चूँकि इसकी गति का संबंध N ∝ (V − IaRa) / φ से होता है और शंट मोटर में फ्लक्स φ लगभग स्थिर रहता है, इसलिए लोड बदलने पर भी इसकी स्पीड में बहुत कम परिवर्तन होता है। इसी कारण इसका उपयोग लेथ मशीन, मिलिंग मशीन, ड्रिलिंग मशीन, ग्राइंडर और अन्य मशीन टूल्स में किया जाता है जहाँ सटीक RPM आवश्यक है। इसके अतिरिक्त यह सेंट्रीफ्यूगल पंप, ब्लोअर, कन्वेयर बेल्ट, प्रिंटिंग प्रेस, टेक्सटाइल मशीनों और पेपर मिलों में भी प्रयुक्त होती है। चूँकि इसका टॉर्क संबंध T ∝ φIa से व्यक्त होता है और फ्लक्स स्थिर होने के कारण टॉर्क नियंत्रित रहता है, इसलिए यह मध्यम स्टार्टिंग टॉर्क और स्थिर संचालन वाले औद्योगिक अनुप्रयोगों के लिए अत्यंत उपयुक्त मानी जाती है।
धन्यवाद! हमें उम्मीद है कि यह पोस्ट ”DC Shunt Motor” आपके लिए जानकारीपूर्ण और मददगार रही होगी। अगर आपके कोई विचार, अनुभव या सवाल हैं, तो उन्हें नीचे कमेंट में शेयर करना न भूलें.
