
आज के आधुनिक ऑटोमेशन और रोबोटिक्स युग में सटीक नियंत्रण (Precision Control) की आवश्यकता लगातार बढ़ रही है। मशीनों, CNC सिस्टम, रोबोटिक आर्म और औद्योगिक उपकरणों में ऐसी मोटर की जरूरत होती है जो केवल घूमे ही नहीं, बल्कि निर्धारित कोण, गति और टॉर्क के साथ पूरी सटीकता से कार्य करे। यही कारण है कि dc servo motor in hindi विषय को समझना तकनीकी छात्रों, इंजीनियरों और इलेक्ट्रॉनिक्स के शौकीनों के लिए बेहद महत्वपूर्ण हो जाता है।
डीसी सर्वो मोटर एक ऐसी नियंत्रित मोटर है जो फीडबैक सिस्टम के माध्यम से अपनी स्थिति और गति को लगातार मॉनिटर करती है और आवश्यकतानुसार स्वयं को समायोजित करती है। इसकी यही विशेषता इसे सामान्य डीसी मोटर से अलग और अधिक उन्नत बनाती है। इस लेख में हम DC Servo Motor के कार्य सिद्धांत, निर्माण, प्रकार, विशेषताएँ, अनुप्रयोग और इसके लाभ-हानि को विस्तार से समझेंगे, ताकि आपको इस विषय की संपूर्ण और व्यावहारिक जानकारी एक ही स्थान पर मिल सके।
Table of Contents
डीसी सर्वो मोटर क्या है? ( What Is DC Servo Motor in Hindi)
डीसी सर्वो मोटर (DC Servo Motor) एक उन्नत एवं उच्च-सटीकता वाली इलेक्ट्रिक मोटर है, जो प्रत्यक्ष धारा (Direct Current) पर कार्य करती है तथा अपने आउटपुट शाफ्ट की स्थिति (Position), गति (Speed) और टॉर्क (Torque) को अत्यंत नियंत्रित एवं मापनीय तरीके से संचालित करने के लिए डिजाइन की जाती है।
यह सामान्य डीसी मोटर से भिन्न होती है क्योंकि इसमें केवल निरंतर घूर्णन (Rotation) ही उद्देश्य नहीं होता, बल्कि पूर्व निर्धारित मान (Target Value) के अनुसार सटीक नियंत्रण और स्थिरता बनाए रखना प्रमुख होता है।
सरल शब्दों में, डीसी सर्वो मोटर को जिस कोण, गति या स्थिति तक पहुंचने का आदेश दिया जाता है, वह उसी के अनुरूप कार्य करती है। यदि वास्तविक आउटपुट और निर्धारित लक्ष्य (Set Point) के बीच कोई अंतर (Error) उत्पन्न होता है, तो कंट्रोल सिस्टम तुरंत उस अंतर को पहचानता है और सुधारात्मक (Corrective) सिग्नल प्रदान करता है।
इसी स्वचालित त्रुटि-सुधार प्रक्रिया के कारण यह मोटर अत्यधिक सटीक (High Precision), स्थिर (Stable) और दोहराव योग्य (Highly Repeatable) परिणाम प्रदान करती है।
डीसी सर्वो मोटर की परिभाषा
डीसी सर्वो मोटर वह विद्युत मोटर है जो डीसी इनपुट पर कार्य करते हुए अपने आउटपुट शाफ्ट की स्थिति, वेग या त्वरण को एक क्लोज्ड-लूप नियंत्रण प्रणाली की सहायता से नियंत्रित करती है।
इस प्रणाली में फीडबैक डिवाइस, जैसे एन्कोडर (Encoder) या पोटेंशियोमीटर (Potentiometer), लगातार वास्तविक आउटपुट की जानकारी कंट्रोलर को प्रदान करते हैं। कंट्रोलर इस वास्तविक मान की तुलना निर्धारित मान (Set Point) से करता है और आवश्यकतानुसार मोटर को समायोजित सिग्नल भेजता है, जिससे त्रुटि न्यूनतम स्तर पर बनी रहती है और सटीक नियंत्रण सुनिश्चित होता है।
और पढ़ें: AC Servo Motor क्या है?
डीसी सर्वो मोटर डायग्राम (DC Servo Motor Diagram)
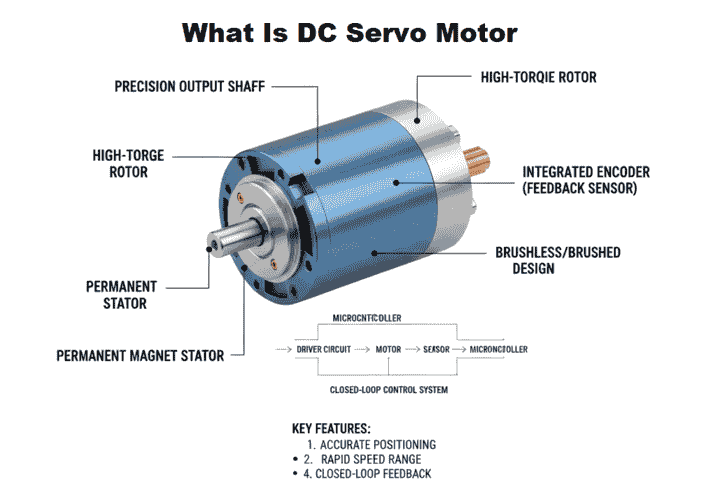
यह डायग्राम DC सर्वो मोटर की आंतरिक संरचना और इसके क्लोज्ड-लूप नियंत्रण प्रणाली (Closed-Loop System) को स्पष्ट रूप से दर्शाता है। आम मोटर के विपरीत, सर्वो मोटर का उद्देश्य केवल घूमना नहीं होता, बल्कि यह एक सटीक कोण (Precise Angle) या पोजीशन पर स्थिर रहना सुनिश्चित करती है।
1. मोटर की आंतरिक संरचना (Motor Components)
स्टेटर (Stator): स्टेटर मोटर का स्थिर बाहरी हिस्सा है, जिसमें स्थायी चुंबक (Permanent Magnets) लगे होते हैं। यह रोटर के चारों ओर स्थिर चुंबकीय क्षेत्र उत्पन्न करता है, जो रोटर के घूर्णन में आवश्यक बल प्रदान करता है।
रोटर / आर्मेचर (Rotor / Armature): रोटर मोटर का घूमने वाला हिस्सा है, जिसमें तांबे के तार की वाइंडिंग होती है। जब इसमें विद्युत धारा प्रवाहित होती है, तो यह चुंबकीय क्षेत्र के प्रभाव से घूमना शुरू करता है।
कम्यूटेटर और ब्रश (Commutator & Brushes): ब्रश के माध्यम से करंट कम्यूटेटर तक पहुँचता है। कम्यूटेटर आर्मेचर वाइंडिंग में करंट की दिशा को बदलता रहता है, ताकि रोटर लगातार एक समान दिशा में घूम सके।
आउटपुट शाफ्ट (Output Shaft): यह वह धुरी है जो मोटर से बाहर निकलती है और मशीन या गियर सिस्टम से जुड़ती है, जिससे यांत्रिक आउटपुट प्राप्त होता है।
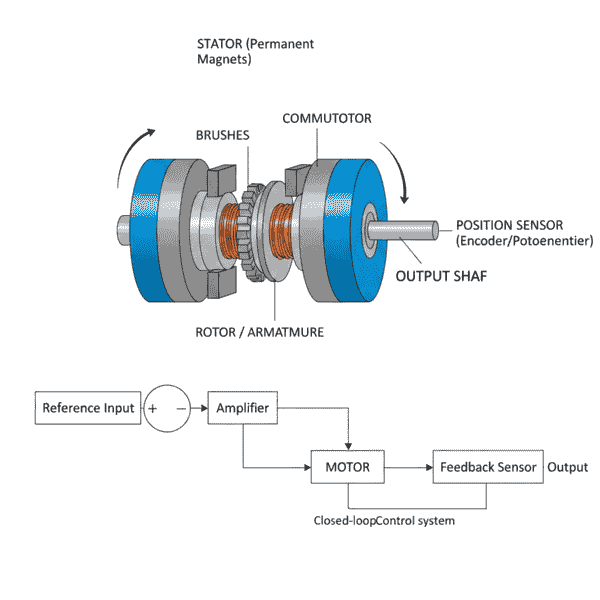
2. क्लोज्ड-लूप कंट्रोल सिस्टम (Closed-Loop Control System)
डायग्राम के निचले हिस्से से यह समझा जा सकता है कि सर्वो मोटर इतनी सटीक क्यों होती है।
Reference Input: यह वह निर्देश है जो मोटर को दिया जाता है, जैसे: “90 डिग्री पर रुको।”
Comparator (तुलना करने वाला): Comparator इनपुट सिग्नल और फीडबैक सेंसर से प्राप्त सिग्नल की तुलना करता है। यदि मोटर वांछित पोजीशन पर नहीं है, तो यह Error Signal उत्पन्न करता है।
Amplifier: Amplifier छोटे Error Signal को पर्याप्त शक्ति प्रदान करता है ताकि मोटर को नियंत्रित और संचालित किया जा सके।
Feedback Sensor (Encoder / Potentiometer): फीडबैक सेंसर मोटर के शाफ्ट से जुड़ा होता है और लगातार शाफ्ट की वास्तविक स्थिति को मापता है। यह जानकारी सिस्टम को वापस भेजता है, जिससे मोटर अपनी स्थिति को लगातार सुधारती रहती है और उच्च सटीकता सुनिश्चित होती है।
और पढ़ें: DC Shunt Motor – परिभाषा, डायग्राम, विशेषताएँ
DC Servo Motor का कार्य सिद्धांत (Working Principle)
डीसी सर्वो मोटर का कार्य सिद्धांत क्लोज्ड-लूप फीडबैक कंट्रोल सिस्टम (Closed-Loop Feedback Control System) पर आधारित होता है। इसका मूल उद्देश्य है – वांछित स्थिति (Desired Position), गति (Speed) या टॉर्क (Torque) को अत्यधिक सटीकता के साथ प्राप्त करना और बनाए रखना।
यह मोटर केवल घूमती नहीं है, बल्कि कंट्रोलर द्वारा दिए गए आदेश के अनुसार नियंत्रित रूप से कार्य करती है और फीडबैक के आधार पर स्वयं को लगातार सुधारती रहती है।
डीसी सर्वो मोटर कैसे काम करती है?
इसकी कार्यप्रणाली को चरणबद्ध तरीके से समझें:
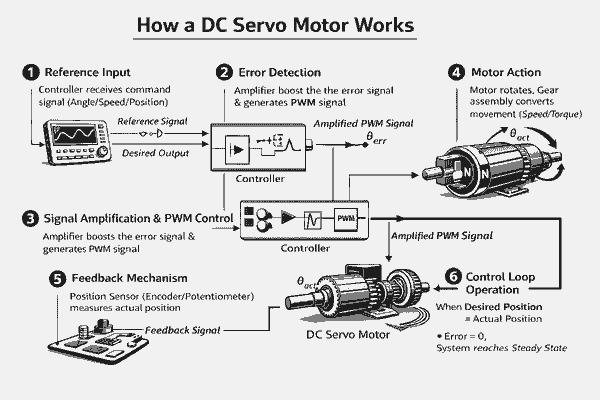
1. इनपुट सिग्नल (Reference Input)
सबसे पहले कंट्रोलर को एक कमांड या रेफरेंस सिग्नल दिया जाता है। यह सिग्नल निर्धारित करता है कि मोटर शाफ्ट को किस कोण (Angle), किस गति (Speed) या किस स्थिति (Position) तक पहुँचना है।
यह कमांड सामान्यतः PWM (Pulse Width Modulation) सिग्नल या एनालॉग वोल्टेज के रूप में प्रदान की जाती है। यही रेफरेंस सिग्नल संपूर्ण नियंत्रण प्रक्रिया का प्रारंभिक बिंदु होता है।
2. एरर डिटेक्शन (Error Generation)
कंट्रोलर वांछित स्थिति (Reference Signal) की तुलना सेंसर से प्राप्त वास्तविक आउटपुट (Feedback Signal) से करता है। यदि दोनों मान समान नहीं होते, तो उनके अंतर को त्रुटि संकेत (Error Signal) कहा जाता है।
गणितीय रूप में:
Error = Desired Output − Actual Output
यही त्रुटि संकेत नियंत्रण प्रणाली का आधार बनता है। त्रुटि जितनी अधिक होगी, सुधारात्मक क्रिया उतनी ही तीव्र होगी।
3. सिग्नल प्रवर्धन और PWM नियंत्रण
उत्पन्न त्रुटि संकेत को एम्पलीफायर द्वारा उपयुक्त स्तर तक बढ़ाया जाता है, ताकि वह मोटर को प्रभावी रूप से नियंत्रित कर सके। इसके बाद PWM तकनीक का उपयोग करके मोटर को नियंत्रित वोल्टेज या करंट प्रदान किया जाता है।
PWM में पल्स की चौड़ाई (Pulse Width) को बदला जाता है, जिससे मोटर की गति और दिशा नियंत्रित होती है। अधिक पल्स चौड़ाई का अर्थ अधिक औसत वोल्टेज और अधिक गति है।
PWM सिग्नल सामान्यतः एक संदर्भ तरंग (Reference Wave) और तुलनित्र (Comparator) की सहायता से उत्पन्न किया जाता है, जिससे सटीक नियंत्रण संभव हो पाता है।
4. मोटर क्रिया (Motor Action)
एम्पलीफाइड PWM सिग्नल डीसी मोटर को प्रदान किया जाता है। इसके परिणामस्वरूप मोटर शाफ्ट घूमना प्रारंभ करता है।
यदि गियर असेंबली लगी हो, तो यह मोटर की उच्च गति को आवश्यक टॉर्क और उपयुक्त गति में परिवर्तित कर देती है। इस चरण में मोटर यांत्रिक आउटपुट प्रदान करती है, जबकि सेंसर लगातार नई स्थिति को मापने के लिए सक्रिय रहता है।
5. फीडबैक मैकेनिज़्म (Feedback Mechanism)
पोजीशन सेंसर, जैसे पोटेंशियोमीटर या एनकोडर, मोटर शाफ्ट की वास्तविक स्थिति को मापता है।
पोटेंशियोमीटर के मामले में, शाफ्ट की स्थिति बदलने पर प्रतिरोध बदलता है, जिससे आउटपुट वोल्टेज में परिवर्तन होता है। यह परिवर्तित वोल्टेज कंट्रोलर को फीडबैक सिग्नल के रूप में भेजा जाता है।
यह फीडबैक प्रक्रिया निरंतर चलती रहती है और सिस्टम को वास्तविक समय (Real-Time) में सटीक नियंत्रण प्रदान करती है।
6. त्रुटि शून्य होने तक नियंत्रण (Control Loop Operation)
जब तक त्रुटि संकेत शून्य नहीं होता, नियंत्रण प्रणाली सक्रिय रहती है और मोटर को आवश्यक सुधारात्मक सिग्नल भेजती रहती है।
जब:
Desired Position = Actual Position
तब त्रुटि शून्य (Error = 0) हो जाती है और मोटर स्थिर अवस्था (Steady State) में पहुँच जाती है। इस स्थिति को Zero Steady-State Error Condition कहा जाता है। यही क्लोज्ड-लूप सर्वो प्रणाली की प्रमुख विशेषता है, जो इसे अत्यधिक सटीक और विश्वसनीय बनाती है।
और पढ़ें: सीरीज डीसी मोटर की कार्यप्रणाली और अनुप्रयोग
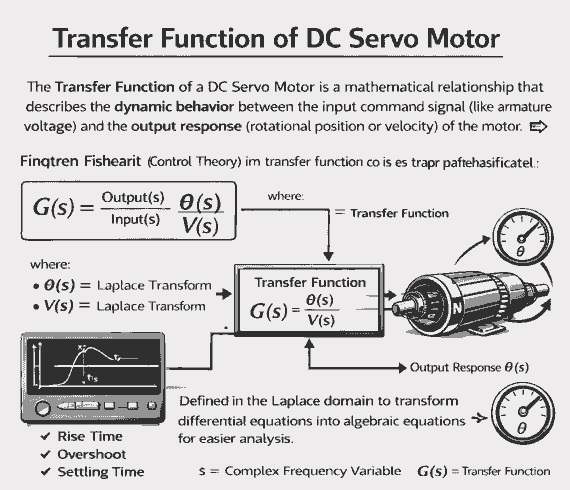
डीसी सर्वो मोटर का ट्रांसफर फंक्शन (Transfer Function of DC Servo Motor)
डीसी सर्वो मोटर का ट्रांसफर फंक्शन वह गणितीय संबंध है जो इनपुट कमांड सिग्नल (जैसे आर्मेचर वोल्टेज) और आउटपुट प्रतिक्रिया (जैसे कोणीय स्थिति या कोणीय वेग) के बीच मौजूद गतिशील व्यवहार (Dynamic Behavior) को दर्शाता है।
यह केवल स्थिर अनुपात (Static Ratio) नहीं होता, बल्कि यह बताता है कि समय के साथ मोटर इनपुट में परिवर्तन पर किस प्रकार प्रतिक्रिया करती है — कितनी तेज़ी से प्रतिक्रिया देती है, कितना ओवरशूट होता है, और कितनी स्थिरता के साथ लक्ष्य स्थिति तक पहुँचती है।
नियंत्रण सिद्धांत (Control Theory) में ट्रांसफर फंक्शन को Laplace डोमेन में परिभाषित किया जाता है, ताकि अवकल समीकरणों (Differential Equations) को बीजगणितीय रूप में बदला जा सके और विश्लेषण सरल हो सके। इसे इस प्रकार व्यक्त किया जाता है:
G(s) = Output(s) / Input(s)
अर्थात,
G(s) = Θ(s) / V(s)
जहाँ:
- Θ(s) = आउटपुट कोणीय स्थिति का Laplace Transform
- V(s) = इनपुट वोल्टेज का Laplace Transform
यहाँ “s” एक कॉम्प्लेक्स फ़्रीक्वेंसी वेरिएबल है, जो प्रणाली की ट्रांज़िएंट (Transient) और स्थिर-अवस्था (Steady-State) दोनों प्रकार की प्रतिक्रियाओं का विश्लेषण करने में सहायता करता है।
सरल शब्दों में, ट्रांसफर फंक्शन यह दर्शाता है कि यदि मोटर को कोई निश्चित वोल्टेज दिया जाए, तो वह किस अनुपात और किस गति से कोणीय स्थिति या वेग उत्पन्न करेगी। इसमें मोटर के विद्युत पैरामीटर (जैसे प्रतिरोध, प्रेरकत्व), यांत्रिक पैरामीटर (जैसे जड़त्व, घर्षण) तथा ड्राइव सिस्टम का संयुक्त प्रभाव शामिल होता है।
इसी कारण ट्रांसफर फंक्शन सर्वो प्रणाली के विश्लेषण, स्थिरता परीक्षण, कंट्रोलर डिजाइन (जैसे PID ट्यूनिंग) और प्रदर्शन सुधार के लिए अत्यंत महत्वपूर्ण आधार प्रदान करता है।
और पढ़ें: ब्रशलेस डी सी मोटर क्या है? उपयोग और महत्व
DC Servo Motor के प्रकार (Types of DC Servo Motor)
डीसी सर्वो मोटर को विभिन्न तकनीकी आधारों पर वर्गीकृत किया जाता है, जैसे – निर्माण (Construction), कम्यूटेशन विधि (Commutation Method), उत्तेजना प्रणाली (Excitation Method) और मोशन के प्रकार (Type of Motion)। प्रत्येक प्रकार का चयन अनुप्रयोग की सटीकता, लागत, दक्षता और मेंटेनेंस आवश्यकताओं के आधार पर किया जाता है।
नीचे डीसी सर्वो मोटर के प्रमुख प्रकारों का विस्तृत और व्यवस्थित वर्गीकरण दिया गया है।
निर्माण (Construction) के आधार पर DC Servo Motor
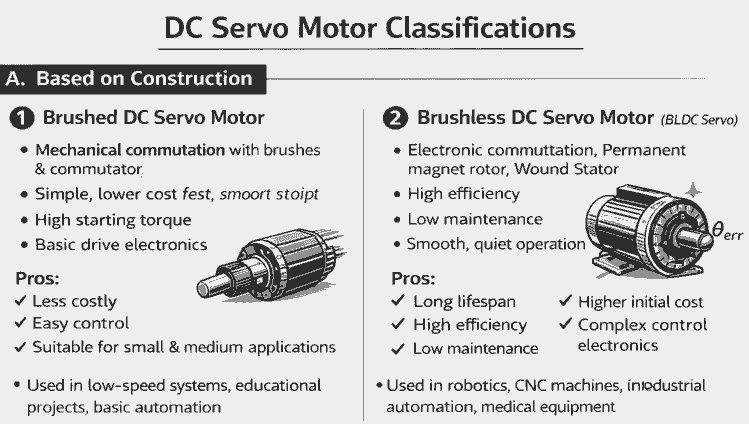
1. Brushed DC Servo Motor
इस प्रकार की मोटर में मैकेनिकल कम्यूटेशन होता है, जहाँ ब्रश और कम्यूटेटर आर्मेचर में करंट की दिशा बदलते हैं। इसका डिजाइन सरल और लागत अपेक्षाकृत कम होती है। यह उच्च स्टार्टिंग टॉर्क प्रदान करती है तथा बुनियादी ड्राइव इलेक्ट्रॉनिक्स से नियंत्रित की जा सकती है।
इसके प्रमुख लाभ हैं कम लागत, आसान नियंत्रण और छोटे-मध्यम अनुप्रयोगों के लिए उपयुक्तता। हालांकि, ब्रश के घिसने के कारण नियमित मेंटेनेंस की आवश्यकता होती है, विद्युत शोर उत्पन्न होता है और जीवनकाल ब्रशलेस मोटर की तुलना में कम होता है। इसका उपयोग कम गति वाले सिस्टम, शैक्षणिक परियोजनाओं और बेसिक ऑटोमेशन में किया जाता है।
2. Brushless DC Servo Motor (BLDC Servo)
इस मोटर में मैकेनिकल ब्रश नहीं होते; कम्यूटेशन पूर्णतः इलेक्ट्रॉनिक रूप से किया जाता है। इसमें स्थायी चुंबक रोटर और वाउंड स्टेटर होता है, जिससे उच्च दक्षता और स्मूथ संचालन प्राप्त होता है।
यह लंबा जीवनकाल, कम मेंटेनेंस और उच्च प्रदर्शन प्रदान करती है, लेकिन इसकी प्रारंभिक लागत अधिक तथा कंट्रोल इलेक्ट्रॉनिक्स अपेक्षाकृत जटिल होते हैं। इसका व्यापक उपयोग रोबोटिक्स, CNC मशीन, इंडस्ट्रियल ऑटोमेशन और मेडिकल उपकरणों में किया जाता है।
उत्तेजना (Excitation) के आधार पर DC Servo Motor
- Permanent Magnet DC Servo (PMDC): इसमें स्टेटर में स्थायी चुंबक प्रयुक्त होते हैं, जिससे मोटर का आकार कॉम्पैक्ट और दक्षता बेहतर होती है। यह छोटे और हल्के अनुप्रयोगों के लिए उपयुक्त है।
- Separately Excited DC Servo Motor: इसमें फील्ड वाइंडिंग को अलग DC स्रोत से सप्लाई दी जाती है, जिससे फील्ड और आर्मेचर का स्वतंत्र नियंत्रण संभव होता है। यह उच्च सटीकता वाले औद्योगिक नियंत्रण सिस्टम के लिए उपयुक्त मानी जाती है।
- Armature-Controlled DC Servo Motor: इस प्रकार में गति और टॉर्क को आर्मेचर वोल्टेज बदलकर नियंत्रित किया जाता है। यह तेज प्रतिक्रिया (Fast Response) और उच्च नियंत्रण सटीकता प्रदान करती है।
- Field-Controlled DC Servo Motor: इसमें गति नियंत्रण फील्ड करंट को बदलकर किया जाता है। यह बड़े पावर अनुप्रयोगों में उपयोगी होती है, हालांकि इसकी प्रतिक्रिया अपेक्षाकृत धीमी होती है।
मोशन (Motion Type) के आधार पर DC Servo Motor
- Positional Rotation Servo Motor: यह सीमित कोण (जैसे 0°–180° या 270°) तक घूमती है और सटीक कोणीय नियंत्रण प्रदान करती है। इसका उपयोग रोबोटिक आर्म और CNC मशीनों में होता है।
- Continuous Rotation Servo Motor: यह 360° निरंतर घूम सकती है और इसकी गति नियंत्रित की जा सकती है। कन्वेयर सिस्टम और ड्राइव सिस्टम में इसका उपयोग होता है।
- Linear Servo Motor: यह घूर्णन के बजाय सीधी रेखा में गति प्रदान करती है। उच्च-परिशुद्धता मशीनिंग और मेडिकल उपकरणों में इसका उपयोग किया जाता है।
और पढ़ें: डीसी मोटर क्या है? उपयोग और महत्व
DC Servo Motor को नियंत्रित और संचालित करने का तरीका
डीसी सर्वो मोटर में एक फीडबैक सिस्टम होता है, जो पोटेंशियोमीटर या एनकोडर के माध्यम से शाफ्ट की वास्तविक स्थिति को मापता है। कंट्रोलर इस माप को वांछित स्थिति (Reference Input) से तुलना करता है। यदि कोई अंतर (Error) होता है, तो कंट्रोलर मोटर को सही स्थिति में लाने के लिए तुरंत संकेत भेजता है।
इस प्रक्रिया के कारण मोटर स्वयं को लगातार समायोजित (Adjust) करती रहती है, जिससे आउटपुट त्रुटि न्यूनतम रहती है और उच्च सटीकता सुनिश्चित होती है।
- PWM नियंत्रण (Pulse Width Modulation): डीसी सर्वो मोटर में गति और स्थिति नियंत्रण के लिए PWM तकनीक का उपयोग किया जाता है। PWM सिग्नल की Duty Cycle बदलकर मोटर पर प्रभावी वोल्टेज नियंत्रित किया जाता है। इससे रोटर का कोण 0° से 180° या अधिक तक सटीक रूप से नियंत्रित किया जा सकता है। PWM नियंत्रण मोटर को तेज़ प्रतिक्रिया (Fast Response) और उच्च सटीक पोजिशनिंग (High Precision Positioning) प्रदान करता है।
- आर्मेचर वोल्टेज नियंत्रण (Armature Control): इसमें मोटर की गति और दिशा को आर्मेचर वोल्टेज बदलकर नियंत्रित किया जाता है। यह सबसे सामान्य और तेज़ प्रतिक्रिया देने वाला तरीका है।
- फील्ड नियंत्रण (Field Control): इसमें मोटर के फील्ड करंट को बदलकर टॉर्क और गति नियंत्रित की जाती है। यह तरीका बड़े भार वाले या धीमी गति वाले अनुप्रयोगों के लिए उपयुक्त है।
DC Servo Motor को माइक्रोकंट्रोलर के साथ इंटरफेस करना
डीसी सर्वो मोटर को Arduino, STM32, Raspberry Pi या किसी अन्य माइक्रोकंट्रोलर के साथ इंटरफेस करना आसान और प्रभावी है। यह मुख्य रूप से PWM (Pulse Width Modulation) सिग्नल और फीडबैक सिस्टम के माध्यम से किया जाता है।
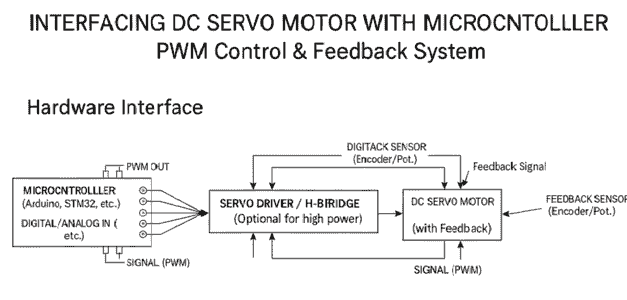
1. हार्डवेयर इंटरफेस
डीसी सर्वो मोटर आमतौर पर तीन तारों (3-Wire) के साथ आता है:
- पावर (Vcc): यह मोटर के लिए आवश्यक वोल्टेज (जैसे 5V या 6V) प्रदान करता है।
- ग्राउंड (GND): यह सर्किट को सामान्य ग्राउंड से जोड़ता है।
- सिग्नल (Signal/PWM): यह माइक्रोकंट्रोलर से आने वाला PWM इनपुट होता है, जो मोटर की स्थिति और गति को नियंत्रित करता है।
यदि मोटर को बड़े वोल्टेज या करंट की आवश्यकता हो, तो इसे सीधे माइक्रोकंट्रोलर से कनेक्ट न करें। इसके लिए सर्वो ड्राइवर बोर्ड या H-ब्रिज सर्किट का उपयोग किया जाता है।
2. PWM सिग्नल के माध्यम से नियंत्रण
माइक्रोकंट्रोलर PWM सिग्नल उत्पन्न करता है। PWM की ड्यूटी साइकिल (Pulse Width) मोटर रोटर के कोण को नियंत्रित करती है।
- सामान्यत: 1ms पल्स → 0°
- 1.5ms पल्स → 90°
- 2ms पल्स → 180°
इस प्रकार, माइक्रोकंट्रोलर मोटर की स्थिति और गति को सटीक रूप से नियंत्रित कर सकता है।
3. फीडबैक और सटीक नियंत्रण
कई DC सर्वो मोटर्स में एनकोडर या पोटेंशियोमीटर शामिल होते हैं।
फीडबैक इनपुट माइक्रोकंट्रोलर के डिजिटल या एनालॉग पिन से पढ़ा जाता है। इसके आधार पर, माइक्रोकंट्रोलर PWM सिग्नल को रीयल-टाइम में समायोजित करता है। इससे मोटर वांछित स्थिति या गति तक पहुँचकर उसे बनाए रखती है और ओवरशूट या त्रुटि कम होती है।
4. सॉफ़्टवेयर दृष्टिकोण
माइक्रोकंट्रोलर कोड में सामान्यत: निम्नलिखित कार्य शामिल होते हैं:
- PWM आउटपुट पिन सेट करना और आवृत्ति निर्धारित करना।
- लक्ष्य स्थिति या गति निर्धारित करना।
- फीडबैक रीड करना (एनकोडर या पोटेंशियोमीटर से)।
- PWM ड्यूटी साइकिल को वास्तविक स्थिति के आधार पर समायोजित करना।
- आवश्यकता होने पर PID नियंत्रण एल्गोरिदम लागू करके अधिक सटीक और स्मूथ पोज़िशनिंग प्राप्त करना।
और पढ़ें: फेज़ सीक्वेंस (Phase Sequence) क्या होता है
DC Servo Motor की गति-टॉर्क विशेषताएँ
डीसी सर्वो मोटर एक अत्यधिक परिशुद्धता और तेज़ प्रतिक्रिया प्रदान करने वाली मोटर होती है, जो विशेष रूप से रोबोटिक्स, सीएनसी मशीनों और अन्य स्वचालन प्रणालियों में प्रयोग की जाती है। इन मोटरों की गति और टॉर्क के बीच रैखिक संबंध होता है, जो इनके कार्यक्षेत्र को समझने में सहायक होता है। यह संबंध विशेष रूप से इन मोटरों के प्रदर्शन को प्रभावित करता है, और यह बहुत महत्वपूर्ण होता है जब हमें सही आकार की मोटर का चयन करना होता है।
रैखिक गति-टॉर्क संबंध (Linear Speed-Torque Relationship)
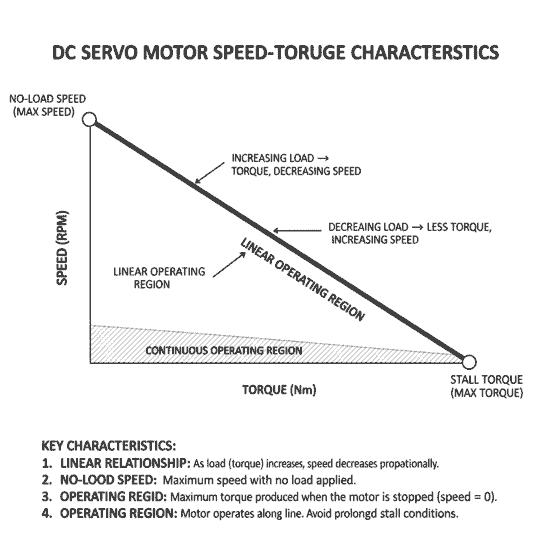
डीसी सर्वो मोटरों में टॉर्क और गति के बीच एक रैखिक संबंध होता है, जिसका अर्थ है कि जैसे-जैसे लोड बढ़ता है, गति उसी अनुपात में घटती जाती है। जब तक मोटर का लोड बढ़ता रहता है, टॉर्क की आवश्यकता भी बढ़ती है, लेकिन गति घटती जाती है।
- बिना लोड पर: मोटर अपनी अधिकतम गति तक पहुँचती है।
- लोड बढ़ने पर: टॉर्क बढ़ता है और गति घटने लगती है।
- स्टॉल टॉर्क: जब लोड इतना बढ़ जाता है कि गति शून्य हो जाती है, तो इसे स्टॉल टॉर्क कहा जाता है।
डीसी सर्वो मोटर के अनुप्रयोग (Applications of DC Servo Motor)
डीसी सर्वो मोटर का उपयोग उन क्षेत्रों में किया जाता है जहाँ उच्च परिशुद्धता, तेज़ प्रतिक्रिया, और सटीक नियंत्रण की आवश्यकता होती है। इसकी गति और स्थिति पर सटीक नियंत्रण इसे कई उद्योगों और अनुप्रयोगों में आदर्श बनाता है। यहाँ कुछ प्रमुख अनुप्रयोग हैं:
- रोबोटिक्स (Robotics): रोबोटिक आर्म्स और जोड़ों में सटीक गति नियंत्रण और पोजीशनिंग के लिए।
- CNC मशीनें (CNC Machines): सटीक पोजीशनिंग और कटाई प्रक्रिया के लिए उच्च परिशुद्धता की आवश्यकता होती है, जिसे डीसी सर्वो मोटर पूरा करती है।
- ऑटोमेशन सिस्टम (Automation Systems): स्वचालित निर्माण प्रक्रियाओं में सटीक गति और नियंत्रण के लिए उपयोगी।
- डिजाइनिंग और प्रिंटिंग मशीनें (Designing & Printing Machines): लाइनेर गति और उच्च सटीकता के लिए इनका उपयोग होता है।
- कैमरा गिम्बल (Camera Gimbal): स्टेबलाइजेशन के लिए कैमरा गिम्बल में उपयोग होता है, ताकि मुलायम और स्थिर वीडियो मिल सकें।
- ऑटोमेटेड दरवाजे (Automated Doors): स्वचालित दरवाजों में गति और स्थिति नियंत्रण के लिए डीसी सर्वो मोटर का उपयोग।
और पढ़ें: स्लिप रिंग इंडक्शन मोटर (Slip Ring Induction Motor) क्या है
डीसी सर्वो मोटर के लाभ और नुकसान (Advantages and Disadvantages of DC Servo Motor)
DC Servo Motor के लाभ (Advantages):
- उच्च सटीकता और नियंत्रण (High Precision & Control): डीसी सर्वो मोटर सटीक गति और पोजीशन नियंत्रण प्रदान करती है, जिससे इसे रोबोटिक्स और CNC जैसी प्रणालियों में आदर्श बना दिया जाता है।
- तेज़ प्रतिक्रिया (Fast Response): यह मोटर तेजी से गति को बदलने और नियंत्रण में रखने में सक्षम होती है, जिससे उच्च प्रदर्शन प्राप्त होता है।
- Closed-loop सिस्टम से Error कम (Low Error with Closed-loop System): फीडबैक तंत्र के माध्यम से, मोटर के आउटपुट को सटीक रूप से नियंत्रित किया जाता है, जिससे त्रुटि कम होती है।
- थोड़े आकार में भी बेहतर प्रदर्शन (Compact Size with High Performance):छोटे आकार में भी यह मोटर उच्च टॉर्क और गति प्रदान कर सकती है।
- ब्रशलेस में कम मेंटेनेंस (Low Maintenance in Brushless Models): ब्रशलेस डीसी सर्वो मोटर में कम पहनने-फटने वाले हिस्से होते हैं, जिससे इनका रखरखाव कम होता है।
DC Servo Motor के नुकसान (Disadvantages)
- कन्ट्रोल सर्किट और फ़ीडबैक सिस्टम के कारण लागत अधिक (High Cost due to Control Circuit & Feedback System): इन मोटरों में जटिल फीडबैक और नियंत्रक सर्किट की आवश्यकता होती है, जिससे इनकी लागत अधिक होती है।
- भारी भारों के लिए AC Servo बेहतर (AC Servo Motors Better for Heavy Loads): डीसी सर्वो मोटर भारी लोड के लिए उतनी प्रभावी नहीं होती, जबकि AC सर्वो मोटर ऐसे अनुप्रयोगों के लिए अधिक उपयुक्त होती है।
- कुछ प्रकारों में मेंटेनेंस की आवश्यकता (Maintenance Required in Brushed Models): ब्रश्ड डीसी सर्वो मोटरों में ब्रश की घिसावट होती है, जिससे इनका रखरखाव और समय-समय पर मरम्मत की आवश्यकता होती है।
DC Servo Motor vs सामान्य DC Motor (Difference)
DC सर्वो मोटर और सामान्य DC मोटर दोनों ही इलेक्ट्रिक मोटर हैं, लेकिन इन दोनों के बीच कुछ महत्वपूर्ण अंतर होते हैं। जहां एक तरफ डीसी सर्वो मोटर उच्च परिशुद्धता, सटीक गति नियंत्रण, और फीडबैक तंत्र के साथ काम करती है, वहीं दूसरी तरफ सामान्य डीसी मोटर सरल, कम लागत वाले और ऑन/ऑफ नियंत्रण वाली होती है। आइए, इन दोनों के बीच अंतर को समझें:
| Feature | DC Servo Motor | सामान्य DC Motor |
|---|---|---|
| नियंत्रण | Closed-loop, PWM | साधारण On/Off नियंत्रण |
| सटीकता | उच्च | कम |
| Feedback | ज़रूरी | नहीं |
| अनुप्रयोग | Robotics, Automation, Precision Control | सामान्य मोटर कार्य, घरेलू उपकरण |
| कार्यप्रणाली | सटीक गति और पोजीशन नियंत्रण, त्वरित प्रतिक्रिया | केवल गति, सरल ऑन/ऑफ स्विचिंग |
| लागत | अधिक (जटिल नियंत्रण तंत्र) | कम (सरल डिजाइन) |
अक्सर पूछे जाने वाले सवाल (FAQ)
1. डीसी सर्वो मोटर नियंत्रण प्रणाली में क्या है?
डीसी सर्वो मोटर एक प्रकार की इलेक्ट्रिक मोटर है जो क्लोज्ड-लूप नियंत्रण प्रणाली (Closed-Loop Control System) के तहत काम करती है। इस मोटर में एक पोजीशन सेंसर (जैसे एनकोडर) होता है, जो मोटर की वास्तविक स्थिति, गति और टॉर्क को नियंत्रित करता है। सिस्टम में इनपुट सिग्नल (जैसे गति या पोजीशन) के आधार पर मोटर की गति और दिशा को नियंत्रित किया जाता है। यदि वास्तविक स्थिति लक्ष्य से अलग होती है, तो फीडबैक सिग्नल कंट्रोलर द्वारा मोटर को सटीक रूप से नियंत्रित करने के लिए भेजा जाता है।
2. डीसी मोटर को सर्वो मोटर के रूप में कैसे इस्तेमाल करें?
डीसी मोटर को सर्वो मोटर के रूप में उपयोग करने के लिए, आपको इसे एक क्लोज्ड-लूप नियंत्रण प्रणाली में सेटअप करना होगा। इसके लिए सबसे पहले, एक पोजीशन सेंसर (जैसे एनकोडर या पोटेंशियोमीटर) की आवश्यकता होती है, जो मोटर की स्थिति, गति और टॉर्क की वास्तविक जानकारी प्रदान करता है। इसके बाद, इस फीडबैक को एक कंट्रोलर द्वारा प्रोसेस किया जाता है, जो मोटर को वांछित स्थिति तक पहुँचाने के लिए आवश्यक सिग्नल भेजता है। इस प्रक्रिया में पल्स विड्थ मॉड्यूलेशन (PWM) का उपयोग करके मोटर की गति और दिशा को नियंत्रित किया जाता है। इस तरह, डीसी मोटर को सर्वो मोटर में परिवर्तित करने के लिए सही फीडबैक और कंट्रोल सिस्टम की आवश्यकता होती है, जिससे उच्च परिशुद्धता और सटीक गति नियंत्रण प्राप्त किया जा सके।
3. डीसी सर्वो मोटर को मल्टीमीटर से कैसे चेक करें?
डीसी सर्वो मोटर को मल्टीमीटर से चेक करने के लिए, सबसे पहले मोटर के कनेक्शन को सही से डिस्कनेक्ट करें। फिर, मल्टीमीटर को ओम मीटर (Resistance mode) पर सेट करें और मोटर के आर्मेचर टर्मिनलों के बीच रेजिस्टेंस मापें। सामान्यत: अगर रेजिस्टेंस बहुत अधिक या शून्य हो, तो मोटर में शॉर्ट सर्किट या ओपन सर्किट हो सकता है। इसके बाद, बैकर EMF (Back Electromotive Force) को चेक करने के लिए मल्टीमीटर को वोल्टेज मोड पर सेट करें और मोटर के शाफ्ट को घुमाकर वोल्टेज रीडिंग को चेक करें। अगर कोई वोल्टेज उत्पन्न नहीं हो रहा है, तो मोटर में समस्या हो सकती है। इसके अलावा, ब्रश की स्थिति और कम्यूटेटर को भी चेक करें, क्योंकि किसी प्रकार की घिसावट या डैमेज होने से मोटर का प्रदर्शन प्रभावित हो सकता है।
4. डीसी सर्वो मोटर की विशेषताएं क्या हैं?
डीसी सर्वो मोटर उच्च सटीकता, तेज़ प्रतिक्रिया, और क्लोज्ड-लूप कंट्रोल प्रणाली की विशेषता होती है, जो इसे विभिन्न अनुप्रयोगों में आदर्श बनाती है। यह मोटर पोजीशन, गति, और टॉर्क का निरंतर फीडबैक प्राप्त करती है, जिससे त्रुटि कम होती है और प्रदर्शन स्थिर रहता है। डीसी सर्वो मोटर का टॉर्क-टू-इनर्शिया अनुपात उच्च होता है, जिससे इसे त्वरित गति परिवर्तनों और उच्च आरंभिक टॉर्क के लिए आदर्श माना जाता है। ब्रशलेस डीसी सर्वो मोटर में कम रखरखाव की आवश्यकता होती है और इनकी सेवा जीवन लंबी होती है। इसके अलावा, इनका आकार छोटा होता है, फिर भी यह उच्च प्रदर्शन प्रदान करती है, जो उन्हें रोबोटिक्स, सीएनसी मशीनरी और अन्य स्वचालन प्रणालियों में अत्यधिक उपयोगी बनाता है।
धन्यवाद! हमें उम्मीद है कि यह पोस्ट ”DC Servo Motor In Hindi” आपके लिए जानकारीपूर्ण और मददगार रही होगी। अगर आपके कोई विचार, अनुभव या सवाल हैं, तो उन्हें नीचे कमेंट में शेयर करना न भूलें.
